Автор: Денис Аветисян
Новая система управления светофорами использует возможности больших языковых моделей для оперативного реагирования на нештатные ситуации и оптимизации транспортных потоков.
Ищешь ракеты? Это не к нам. У нас тут скучный, медленный, но надёжный, как швейцарские часы, фундаментальный анализ.
Бесплатный Телеграм канал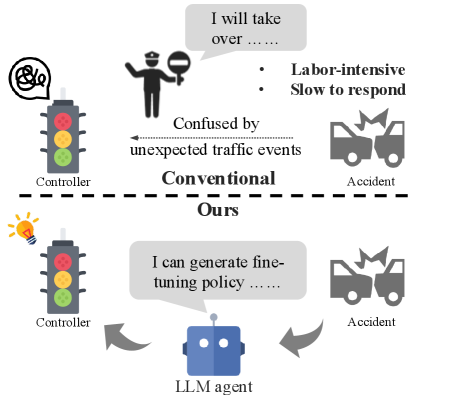
Представлен фреймворк, использующий большие языковые модели и самообучающуюся базу данных дорожной обстановки для адаптивного управления светофорами при возникновении инцидентов.
Несмотря на значительный прогресс в адаптивном управлении транспортными потоками, современные системы часто оказываются неэффективными при возникновении внезапных инцидентов, требуя трудоемкого ручного вмешательства. В данной работе, посвященной разработке системы ‘Virtual Traffic Police: Large Language Model-Augmented Traffic Signal Control for Unforeseen Incidents’, предлагается иерархический подход, дополняющий существующие системы управления светофорами возможностями больших языковых моделей (LLM). Ключевым нововведением является создание самообучающейся базы данных специфического языка, описывающего дорожную ситуацию и принципы работы контроллеров, что позволяет LLM выступать в роли «виртуального инспектора», оперативно адаптирующего параметры светофоров к меняющимся условиям. Способны ли подобные системы кардинально повысить эффективность и надежность управления транспортными потоками в условиях непредсказуемых событий?
Постоянное движение: вызовы современной транспортной системы
Традиционные методы управления дорожным движением все чаще оказываются неспособными эффективно справляться с возрастающей сложностью и непредсказуемостью современных транспортных потоков. Статичные настройки светофоров и заранее запрограммированные алгоритмы не учитывают динамически меняющиеся условия, такие как внезапные пробки, вызванные дорожно-транспортными происшествиями или погодными явлениями. В результате, даже незначительные отклонения от запланированного сценария приводят к заторам и снижению пропускной способности дорог. Исследования показывают, что устаревшие системы зачастую реагируют с опозданием на возникающие проблемы, усугубляя ситуацию и приводя к значительным потерям времени и ресурсов для участников дорожного движения. Необходимость перехода к более адаптивным и интеллектуальным системам управления трафиком становится все более очевидной.
Современные транспортные потоки характеризуются высокой степенью непредсказуемости, и реагирование на внезапные события, такие как дорожно-транспортные происшествия, требует от систем управления мгновенной адаптации. Традиционные, основанные на заранее заданных правилах или статичных алгоритмах, подходы оказываются неспособны эффективно справляться с подобными ситуациями, поскольку не учитывают динамично меняющиеся условия. Возникновение аварии моментально нарушает привычный ритм движения, требуя пересчета маршрутов, перенаправления транспортных средств и оперативной корректировки сигналов светофоров. Статичные системы, не обладая возможностью анализа в реальном времени и прогнозирования последствий, зачастую лишь усугубляют заторы, в то время как гибкие, интеллектуальные решения способны минимизировать негативное влияние и восстановить нормальное движение в кратчайшие сроки.
Эффективное управление инцидентами на дорогах является ключевым фактором для снижения заторов и обеспечения безопасности граждан, однако остается сложной задачей. Несмотря на значительные технологические достижения, оперативное реагирование на внезапные происшествия, такие как аварии или перекрытия полос, часто затруднено. Традиционные системы, основанные на заранее заданных алгоритмах, не способны адекватно учитывать быстро меняющуюся динамику дорожного движения и специфику каждого инцидента. Это приводит к образованию «пробок на ровном месте» и увеличению времени реагирования экстренных служб. Разработка интеллектуальных систем, способных к прогнозированию и адаптивному управлению транспортными потоками в режиме реального времени, представляется необходимым шагом для повышения эффективности дорожной инфраструктуры и снижения рисков для участников движения.
Существующие системы управления транспортными потоками зачастую не способны к тонкому анализу динамики дорожной обстановки, что препятствует эффективному превентивному вмешательству. Традиционные алгоритмы, основанные на фиксированных правилах или усредненных данных, не учитывают сложные взаимосвязи между отдельными транспортными средствами, изменениями в поведении водителей и локальными особенностями дорожной сети. В результате, даже незначительные отклонения от прогнозируемой ситуации — например, внезапное снижение скорости одного автомобиля или появление помех в движении — могут приводить к каскадным заторам. Более глубокое понимание этих нюансов, основанное на анализе данных в реальном времени и применении методов машинного обучения, необходимо для разработки интеллектуальных систем, способных предвидеть и предотвращать возникновение заторов, оптимизируя транспортный поток и повышая безопасность на дорогах.
Виртуальный регулировщик: рождение нового подхода
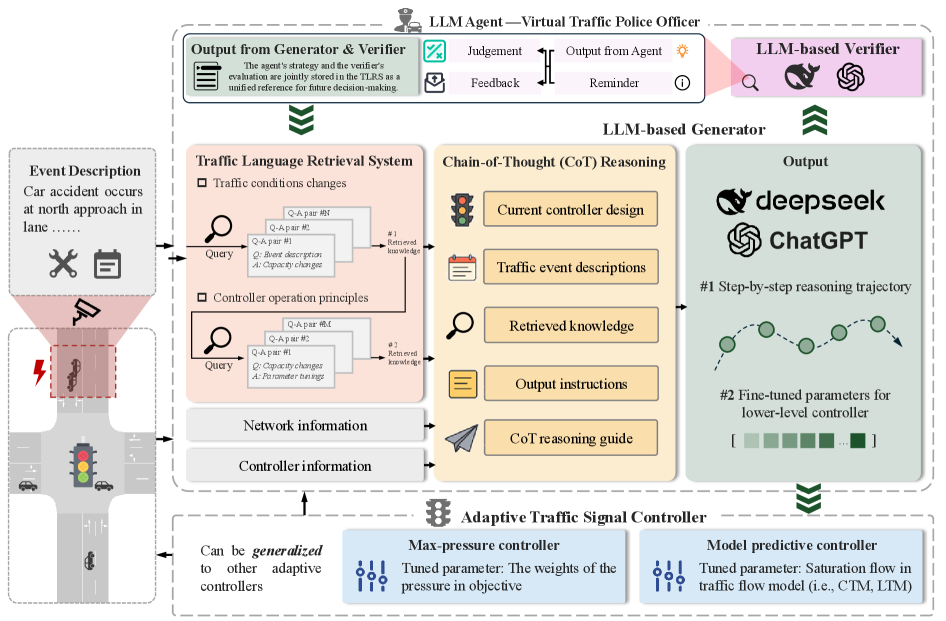
Предлагаемая нами новая структура базируется на концепции «Виртуального сотрудника дорожной полиции», функционирующего на основе больших языковых моделей (LLM). Данный агент предназначен для автоматизированного управления транспортными потоками и оптимизации дорожной ситуации. В основе его работы лежит способность LLM к анализу данных и генерации решений, что позволяет ему выполнять задачи, традиционно возлагаемые на сотрудников дорожной полиции, такие как мониторинг трафика, выявление инцидентов и корректировка сигналов светофоров. Использование LLM обеспечивает масштабируемость и адаптивность системы к изменяющимся условиям дорожного движения.
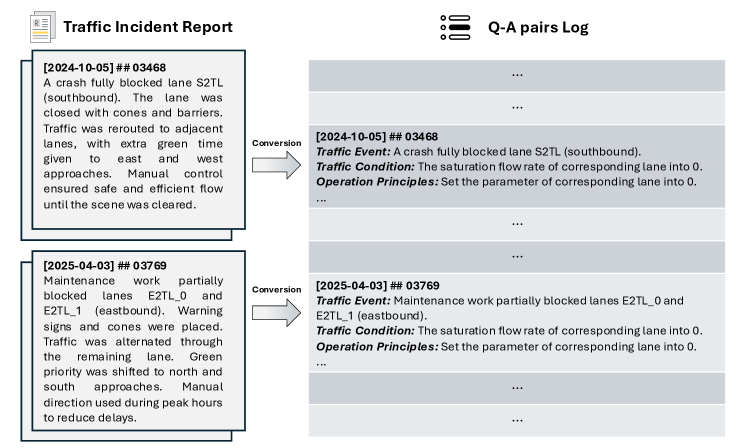
Виртуальный агент дорожного контроля использует “Базу данных языка дорожного движения”, представляющую собой структурированное хранилище исторических данных о транспортных потоках и применяемых стратегиях управления. Данная база данных включает информацию о скорости, плотности, типах транспортных средств, времени суток, погодных условиях и ранее реализованных алгоритмах регулирования дорожного движения, таких как изменение длительности фаз светофоров или перенаправление транспортных потоков. Хранение и систематизация этих данных позволяет агенту анализировать прошлые ситуации, выявлять закономерности и использовать проверенные стратегии для оптимизации текущего дорожного движения и прогнозирования возможных заторов.
Агент использует метод «Chain-of-Thought (CoT) Prompting» — подход, основанный на стимулировании языковой модели к последовательному изложению хода рассуждений при решении задач. Вместо прямого запроса ответа, CoT-подсказки побуждают модель генерировать промежуточные шаги логических выводов, что позволяет ей более эффективно анализировать входные данные и принимать обоснованные решения. Это достигается путем включения в запрос примеров, демонстрирующих детальное описание процесса рассуждений, ведущего к конечному ответу, что значительно повышает качество и контекстуальную релевантность генерируемых ответов в задачах управления транспортными потоками.
Предлагаемый фреймворк обеспечивает управление дорожным движением с учётом инцидентов, позволяя оперативно корректировать сигналы светофоров в ответ на непредвиденные события. Это достигается за счёт анализа текущей дорожной обстановки и прогнозирования влияния инцидента (например, ДТП, перекрытие полосы) на транспортный поток. Система автоматически перенастраивает фазы светофоров на затронутых участках и прилегающих перекрестках, чтобы минимизировать заторы и обеспечить бесперебойное движение транспорта. Корректировки включают изменение длительности фаз, переключение между заранее определенными сценариями управления и динамическое формирование оптимальных планов работы светофоров, учитывающих текущую загруженность дорог.
Самообучение и адаптация: путь к интеллектуальному управлению
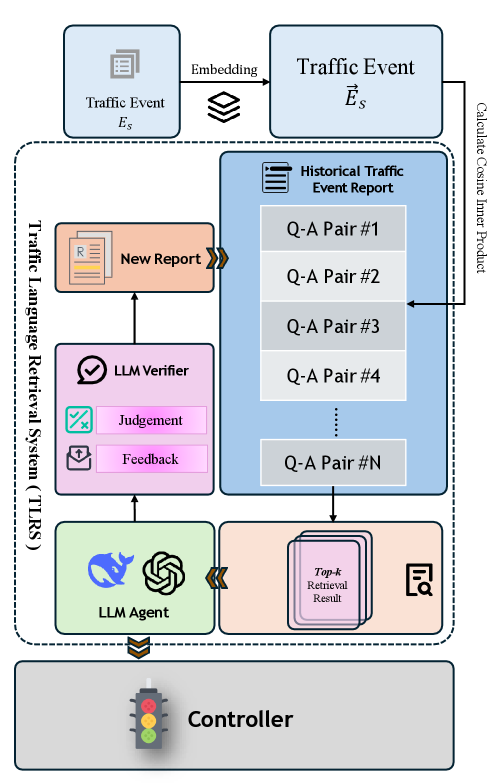
В системе реализован механизм самосовершенствования, позволяющий агенту на основе большой языковой модели (LLM) учиться на предыдущем опыте и улучшать стратегии управления. Этот механизм функционирует путем анализа прошлых действий и результатов, извлечения полезных закономерностей и адаптации алгоритмов принятия решений для оптимизации производительности. Самосовершенствование осуществляется без необходимости явного перепрограммирования, позволяя агенту динамически подстраиваться к изменяющимся условиям и повышать эффективность управления в долгосрочной перспективе.
Механизм самосовершенствования использует верификатор на основе большой языковой модели (LLM) для оценки производительности агента и предоставления обратной связи. Верификатор анализирует действия агента в смоделированных сценариях дорожного движения, оценивая такие параметры, как задержка транспортных средств, пропускная способность и соблюдение правил дорожного движения. Результаты оценки передаются обратно агенту в виде текстовых сигналов, описывающих сильные и слабые стороны его стратегий управления. Эта обратная связь используется для корректировки параметров агента и улучшения его способности адаптироваться к изменяющимся условиям дорожного движения, что позволяет повысить эффективность управления транспортным потоком.
Система извлечения информации о дорожном движении (TLRS) является ключевым компонентом, обеспечивающим расширение возможностей языковой модели (LLM) за счет использования технологии генерации с поиском (Retrieval-Augmented Generation, RAG). TLRS предоставляет LLM релевантную информацию о текущей дорожной обстановке, включая данные о транспортных потоках, пробках и дорожных событиях. Это позволяет LLM генерировать более точные и контекстуально обоснованные стратегии управления транспортными потоками, повышая эффективность работы агента и его адаптивность к изменяющимся условиям. Применение RAG позволяет LLM не только опираться на собственные знания, но и использовать актуальные данные, полученные от TLRS, для улучшения качества принимаемых решений.
Результаты экспериментов демонстрируют, что механизм самосовершенствования значительно повышает способность агента адаптироваться к изменяющимся дорожным условиям. В ходе испытаний зафиксировано снижение задержки транспортных средств на величину до 23% по сравнению с базовыми контроллерами. Данное улучшение производительности достигается за счет анализа прошлых действий агента и корректировки стратегий управления в реальном времени, что позволяет более эффективно реагировать на динамические изменения в транспортном потоке и оптимизировать время прохождения транспортными средствами.
Влияние и перспективы: будущее интеллектуального трафика
Предложенная система управления транспортными потоками демонстрирует заметное улучшение показателей по сравнению с традиционными методами, особенно в ситуациях, связанных с дорожно-транспортными происшествиями. В частности, анализ показывает, что внедрение данной системы значительно повышает безопасность пешеходов, особенно пожилых людей — процент успешного завершения перехода пешеходных переходов для этой группы населения достигает 98,65%. Такой высокий показатель свидетельствует о способности системы эффективно адаптироваться к изменяющимся условиям и оперативно реагировать на потенциальные угрозы, обеспечивая более плавный и безопасный трафик для всех участников дорожного движения. Данное достижение подчеркивает потенциал интеллектуальных систем управления транспортом для создания более комфортной и безопасной городской среды.
Интеграция больших языковых моделей (LLM) с тщательно структурированной базой знаний и механизмом самосовершенствования открывает принципиально новые горизонты в интеллектуальном управлении транспортными потоками. В отличие от традиционных систем, полагающихся на фиксированные алгоритмы, данная архитектура позволяет агенту не только анализировать текущую дорожную обстановку, но и извлекать знания из обширной базы данных о прошлых инцидентах, погодных условиях и даже типичном поведении водителей. Механизм самосовершенствования, основанный на анализе результатов собственных действий, позволяет системе постоянно адаптироваться и оптимизировать свои стратегии управления, повышая эффективность и снижая вероятность заторов. Такой подход позволяет перейти от реактивного управления, когда система реагирует на уже возникшие проблемы, к проактивному — предвидению и предотвращению возникновения заторов, что значительно повышает безопасность и пропускную способность транспортной сети.
В определенных смоделированных ситуациях, предложенная система управления транспортными потоками демонстрирует нулевую задержку для машин скорой помощи. Это представляет собой существенное улучшение по сравнению с базовыми показателями, где задержки были значительными. Достижение нулевой задержки обусловлено способностью системы оперативно перестраивать маршруты и приоритезировать движение экстренных служб, используя информацию о пробках и инцидентах в режиме реального времени. Такой результат подчеркивает потенциал системы не только для оптимизации транспортного потока, но и для повышения эффективности работы служб экстренной помощи, что может спасти жизни и снизить тяжесть последствий несчастных случаев.
Дальнейшие исследования направлены на существенное расширение базы знаний, используемой системой, с включением данных о дорожных работах, погодных условиях и сезонных изменениях транспортного потока. Особое внимание уделяется повышению устойчивости агента к непредсказуемым ситуациям, таким как внезапные аварии или массовые мероприятия, за счет внедрения алгоритмов адаптивного обучения и самокоррекции. Планируется также тестирование разработанной системы в более сложных городских условиях, характеризующихся высокой плотностью движения, разветвленной сетью дорог и наличием различных видов транспорта, включая общественный транспорт и велосипедные дорожки. Это позволит оценить масштабируемость и эффективность предложенного подхода в реальных условиях городской среды и выявить потенциальные области для дальнейшей оптимизации.
Предвидится, что будущее интеллектуальных транспортных систем будет связано с проактивным управлением трафиком, способным предвидеть и смягчать заторы до их возникновения. Такой подход предполагает создание транспортных сетей, которые не просто реагируют на текущую ситуацию, а анализируют данные в реальном времени, прогнозируют потенциальные проблемы и автоматически корректируют параметры движения — от регулирования светофоров до перенаправления транспортных потоков. Это позволит значительно повысить безопасность дорожного движения, снизить время в пути и оптимизировать использование транспортной инфраструктуры, создавая более эффективную и комфортную среду для всех участников движения. В перспективе, подобные системы смогут интегрироваться с различными сервисами, включая общественный транспорт и службы экстренной помощи, обеспечивая комплексное и скоординированное управление городским трафиком.
Исследование демонстрирует, что попытки создать абсолютно предсказуемую систему управления транспортными потоками обречены на провал. Авторы предлагают не строить систему, а взращивать её, используя большие языковые модели для адаптации к непредсказуемым событиям. Этот подход перекликается с философскими взглядами Джона Локка, который утверждал: «Ум — это пустая доска». Подобно тому, как Локк считал, что знания приобретаются опытом, так и предложенная система обучения на основе языковых данных позволяет ей адаптироваться и совершенствоваться в условиях постоянно меняющейся дорожной обстановки. Игнорирование хаоса и случайности в попытках создать идеальную архитектуру системы управления, как показывает исследование, лишь откладывает неизбежное столкновение с реальностью.
Что дальше?
Представленная работа, стремясь обуздать хаос дорожного движения посредством языковых моделей, лишь подчеркивает фундаментальную истину: системы управления — это не конструкции, а скорее экосистемы, постоянно эволюционирующие в ответ на непредсказуемость мира. Масштабируемость, столь часто произносимое слово, оказывается лишь оправданием усложнения, а попытки оптимизировать каждый аспект системы неизбежно ведут к потере гибкости. В конечном счете, идеальная архитектура — это миф, необходимый лишь для того, чтобы сохранить рассудок.
Будущие исследования должны сместить фокус с поиска «оптимального» решения на создание систем, способных к самообучению и адаптации в условиях неполноты данных и постоянно меняющихся обстоятельств. Важнее не «понять» все возможные инциденты, а создать систему, способную извлекать уроки из каждого нового, неожиданного события. Необходимо исследовать не только лингвистические аспекты, но и взаимодействие системы с другими элементами городской инфраструктуры — от датчиков до поведенческих моделей участников дорожного движения.
Вместо того чтобы стремиться к созданию «умного» контроля, возможно, стоит признать, что истинное управление — это искусство смирения перед сложностью. Система, способная признать собственную неполноту и учиться на ошибках, окажется куда более устойчивой и эффективной, чем любая, претендующая на всезнание.
Оригинал статьи: https://arxiv.org/pdf/2601.15816.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- FARTCOIN ПРОГНОЗ. FARTCOIN криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- РИППЛ ПРОГНОЗ. XRP криптовалюта
- AXS ПРОГНОЗ. AXS криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
2026-01-25 14:52