Автор: Денис Аветисян
Новый подход позволяет выявлять нештатные ситуации в прогнозировании траекторий движения нескольких участников, повышая безопасность в сложных сценариях.
В статье представлен фреймворк для неконтролируемого обнаружения аномалий в мультиагентном прогнозировании траекторий, основанный на трансформаторных сетях и корреляции статистических отклонений с индикаторами физического риска.
Обнаружение критических ситуаций в автономном вождении затруднено из-за редкости таких событий и несовершенства традиционных метрик, как Time-to-Collision. В работе, посвященной ‘Unsupervised Anomaly Detection in Multi-Agent Trajectory Prediction via Transformer-Based Models’, предложен новый подход к выявлению аномалий, основанный на Transformer-модели, моделирующей траектории нескольких агентов и оценивающей отклонения через остатки предсказаний. Эксперименты на наборе данных NGSIM продемонстрировали, что предложенный фреймворк позволяет выявлять сложные риски, пропущенные стандартными методами, и классифицировать их по типам. Сможет ли данная методика стать основой для более надежных и безопасных систем автономного вождения, способных предвидеть и предотвращать аварийные ситуации?
Выявление критических аномалий в естественной среде вождения
Существующие методы оценки безопасности транспортных средств зачастую базируются на ограниченном наборе заранее прописанных сценариев, что не позволяет в полной мере отразить всю сложность и непредсказуемость реальных дорожных ситуаций. Эти контролируемые условия, хотя и полезны для базового тестирования, не учитывают множество факторов, характерных для естественного вождения — непредсказуемое поведение других участников движения, переменчивые погодные условия, особенности дорожной инфраструктуры и внезапные препятствия. В результате, оценка безопасности оказывается неполной и может не выявить потенциальные риски, возникающие в реальных условиях эксплуатации автомобиля. Необходимость более точной и всесторонней оценки диктует потребность в подходах, способных анализировать огромные объемы данных, полученных в процессе естественного вождения, и выявлять критические ситуации, которые невозможно предвидеть и воспроизвести в лабораторных условиях.
Выявление редких, но критически важных аномалий в огромных массивах данных, полученных в ходе реальных дорожных поездок, имеет первостепенное значение для повышения безопасности автономных транспортных средств. Традиционные методы тестирования, основанные на заранее заданных сценариях, зачастую не способны отразить всю сложность и непредсказуемость реальных дорожных условий. Именно анализ естественного вождения позволяет обнаружить нетипичные ситуации — резкое торможение, неожиданное появление препятствий, неадекватные маневры других участников движения — которые могут стать причиной аварий. Игнорирование этих аномалий при разработке систем автономного управления может привести к серьезным последствиям, поэтому их точная идентификация и учет являются ключевым фактором для создания надежных и безопасных беспилотных автомобилей.
Традиционные методы обучения с учителем сталкиваются с серьезными трудностями при анализе данных о естественном вождении, поскольку крайне сложно получить размеченные примеры аномальных ситуаций. Редкие, но критически важные отклонения от нормального поведения транспортных средств, такие как внезапные маневры или неожиданные препятствия, практически не представлены в существующих базах данных. В связи с этим, исследователи все чаще обращаются к методам обучения без учителя, способным выявлять необычные паттерны и аномалии, не требуя предварительной разметки данных. Эти подходы позволяют автоматически обнаруживать потенциально опасные ситуации, которые могли бы остаться незамеченными при использовании традиционных алгоритмов, тем самым значительно повышая безопасность автономных транспортных средств и совершенствуя системы помощи водителю.
Точное выявление аномальных ситуаций на дороге требует глубокого понимания сложного взаимодействия между транспортными средствами, что делает задачу особенно трудной. Недостаточно просто зафиксировать отдельные отклонения; необходимо учитывать динамику движения каждого автомобиля, предвидеть его реакции на действия других участников движения и анализировать последствия этих взаимодействий. Например, неожиданное торможение одного автомобиля может спровоцировать цепную реакцию, а неверная оценка дистанции — привести к столкновению. Исследование таких сценариев требует не только анализа данных о скорости и траектории, но и учета факторов, таких как погодные условия, дорожная разметка и поведение водителей. Подобная комплексность делает задачу выявления критических аномалий значительно более сложной, чем простое обнаружение отдельных ошибок или отклонений от нормы.
Неконтролируемое обнаружение аномалий для безопасности вождения
В рамках системы обеспечения безопасности вождения используется неконтролируемое обнаружение аномалий для выявления необычного поведения транспортных средств без необходимости ручной разметки данных. В отличие от подходов, требующих обширных размеченных наборов данных, описывающих нормальное и аномальное вождение, наша методика позволяет идентифицировать отклонения от типичных моделей поведения, анализируя только необработанные данные о движении. Это особенно важно в ситуациях, когда получение размеченных данных затруднено или экономически нецелесообразно, поскольку позволяет автоматически адаптироваться к различным условиям дорожного движения и выявлять потенциально опасные ситуации, не требуя предварительного обучения на заранее определенных сценариях аномального вождения.
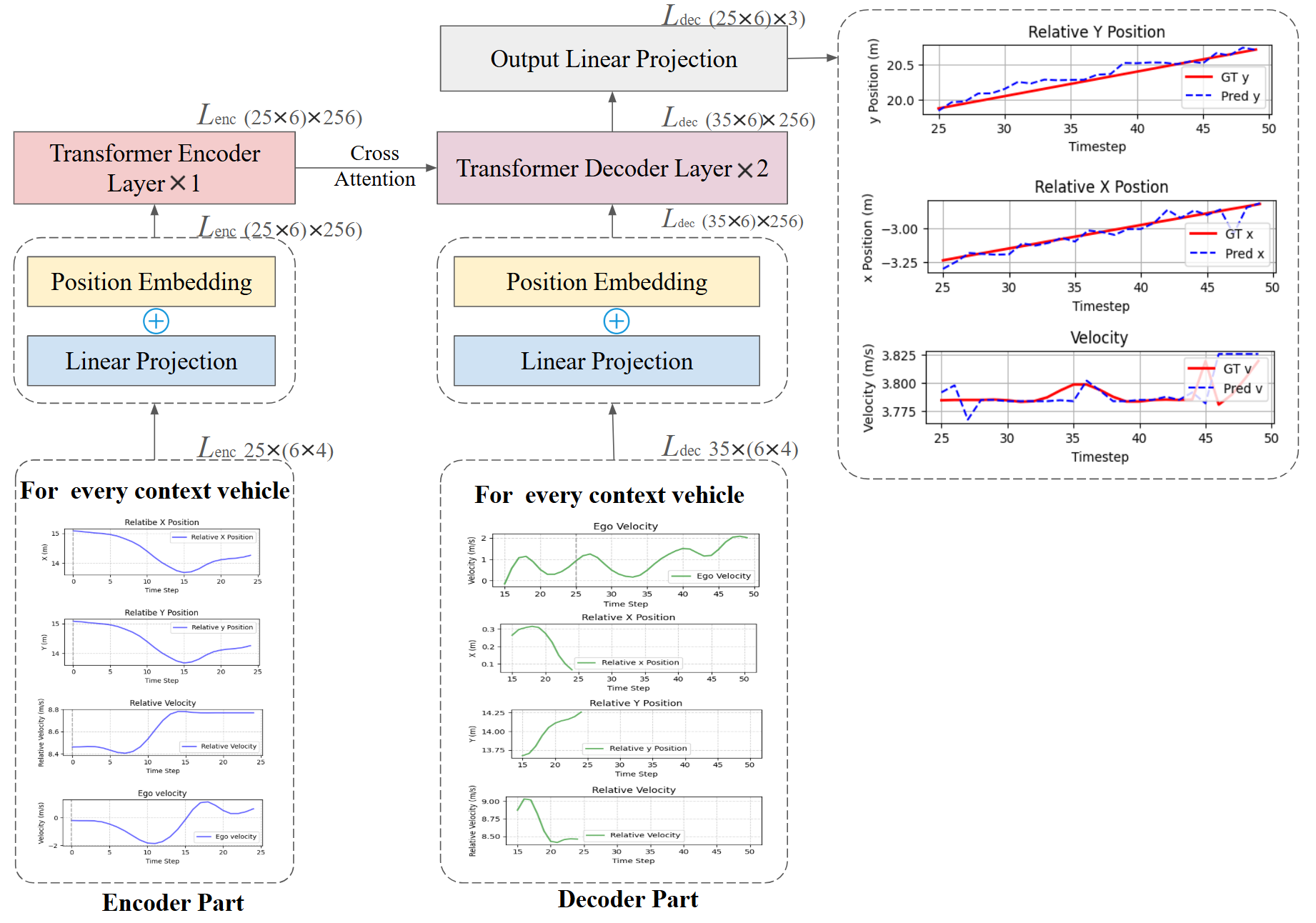
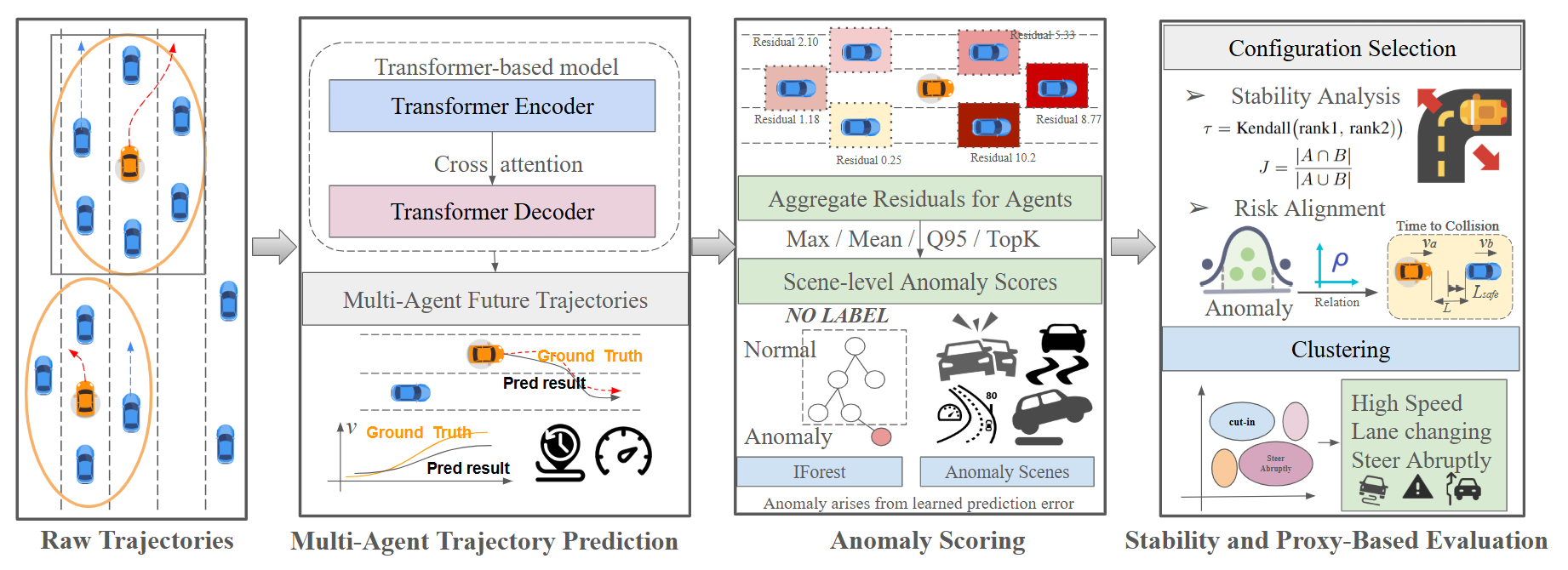
В нашей системе для прогнозирования будущих траекторий окружающих транспортных средств используется архитектура Transformer. Transformer позволяет учитывать взаимосвязи между различными транспортными средствами и их историческими данными о движении, что обеспечивает более точное предсказание их будущих позиций. В отличие от рекуррентных нейронных сетей (RNN), Transformer использует механизм внимания (attention), позволяющий модели одновременно обрабатывать всю последовательность данных, что повышает скорость и точность прогнозирования. Входными данными для модели являются исторические данные о позициях, скоростях и ускорениях окружающих автомобилей, представленные в виде временных рядов. Выходом модели является вероятностное распределение будущих траекторий, позволяющее оценить наиболее вероятные сценарии развития ситуации на дороге.
Для количественной оценки аномального поведения транспортных средств вычисляются так называемые “остатки предсказания” (Prediction Residuals). Данные остатки представляют собой разницу между прогнозируемой траекторией транспортного средства, полученной на основе модели предсказания, и его фактической наблюдаемой траекторией. Величина этого расхождения служит индикатором отклонения от ожидаемого поведения; значительные отклонения указывают на потенциально аномальную ситуацию. Математически, остаток предсказания можно представить как R = Y_{actual} - Y_{predicted}, где Y_{actual} — фактическая траектория, а Y_{predicted} — предсказанная траектория. Анализ величины и направления этих остатков позволяет выявлять нетипичные маневры и потенциально опасные ситуации на дороге.
Оценка аномальности сцены формируется путем агрегирования остатков предсказаний (Prediction Residuals) для всех рассматриваемых транспортных средств. Эта агрегация осуществляется с использованием взвешенной суммы, где веса определяются на основе значимости каждого транспортного средства для общей безопасности дорожного движения — например, учитывается близость к главному транспортному средству и его текущая скорость. Итоговая оценка аномальности сцены представляет собой единое численное значение, отражающее степень отклонения наблюдаемого поведения транспортных средств от ожидаемого, и используется для выявления потенциально опасных ситуаций на дороге. Более высокие значения указывают на более выраженные аномалии и, следовательно, на повышенный риск.

Оценка эффективности на реальных данных о движении
Для оценки эффективности разработанного метода использовался датасет NGSIM (Next Generation Simulation), представляющий собой обширную коллекцию естественных траекторий движения транспортных средств, полученных в реальных дорожных условиях. Данный датасет включает в себя данные, собранные с помощью различных датчиков и камер, обеспечивая разнообразие сценариев и условий движения. NGSIM является общедоступным ресурсом, широко используемым в исследованиях в области автономного вождения и анализа безопасности дорожного движения, что позволяет проводить объективное сравнение с другими подходами и алгоритмами.
В процессе оценки нашей методики на наборе данных NGSIM было выявлено 2832 аномальных ситуаций на дороге. Данный показатель сопоставим с результатами, полученными с использованием алгоритма Isolation Forest (2835 аномальных ситуаций). При этом, наша система позволила выявить 388 уникальных аномальных ситуаций, которые не были обнаружены Isolation Forest, что свидетельствует о её способности к обнаружению специфических и ранее неизвестных типов аномалий в транспортном потоке.
Дополнительный анализ показал высокую степень согласованности в ранжировании аномалий, полученных нашей системой. Коэффициент Кендалла τ превышает 0.95 при использовании различных операторов агрегации. Данный показатель свидетельствует о стабильности и надежности системы в определении относительной серьезности выявленных аномальных ситуаций, независимо от способа объединения результатов анализа отдельных траекторий движения транспортных средств. Высокое значение τ указывает на сильную монотонную связь между ранжировками, полученными системой и эталонными данными, что подтверждает эффективность предложенного подхода.
Оценка системы показала высокую степень согласованности в выявлении аномальных сцен, что подтверждается значением Jaccard@K, превышающим 0.95. Показатель Jaccard@K измеряет пересечение множеств из K наиболее вероятных аномальных сцен, определенных системой, и, следовательно, отражает стабильность и надежность результатов. Значение, близкое к 1, указывает на значительное совпадение между различными результатами, что свидетельствует о том, что система последовательно выявляет одни и те же аномальные ситуации в различных прогонах или с использованием различных параметров. Данный результат подтверждает воспроизводимость и надежность предложенного подхода к обнаружению аномалий в данных о движении транспортных средств.
Расширение рамок: к системам проактивной безопасности
Предложенная платформа не ограничивается обнаружением аномалий, но способна стать основой для создания систем проактивной безопасности. Вместо простой реакции на отклонения, она позволяет перейти к прогнозированию потенциально опасных ситуаций и принятию превентивных мер. Интегрируя методы машинного обучения, такие как обучение с подкреплением и поиск по дереву Монте-Карло, система способна оптимизировать управление транспортным средством, избегая столкновений до того, как они произойдут. Это достигается за счет анализа выявленных аномалий и использования их для формирования стратегии безопасного вождения, что значительно повышает уровень безопасности и надежности транспортных средств.
Для повышения безопасности транспортных средств разрабатываются системы, использующие методы обучения с подкреплением (Reinforcement Learning, RL) и поиска по дереву Монте-Карло (Monte Carlo Tree Search, MCTS). Эти подходы позволяют не просто выявлять аномалии в поведении автомобиля или окружающей обстановке, но и активно использовать эту информацию для оптимизации управления. Например, алгоритмы RL могут обучаться выбирать оптимальные действия в различных ситуациях, минимизируя риск столкновений, а MCTS позволяет эффективно исследовать пространство возможных решений, выбирая наиболее безопасную траекторию движения. Таким образом, идентифицированные аномалии становятся основой для проактивной системы безопасности, способной предвидеть и предотвращать потенциальные аварийные ситуации, значительно повышая надежность и безопасность транспортных средств.
Для повышения точности прогнозирования траектории движения и потенциальных опасностей, в рамках системы безопасности предлагается интеграция моделей Гауссовских процессов (GP) и фильтра Калмана. Эти методы позволяют не только предсказать наиболее вероятный сценарий, но и оценить степень неопределенности этого прогноза. В отличие от детерминированных моделей, GP и фильтр Калмана оперируют с распределением вероятностей, предоставляя информацию о диапазоне возможных состояний системы. Это критически важно для принятия обоснованных решений в условиях неполной информации или шума, поскольку позволяет учитывать риски, связанные с неточностью прогноза, и выбирать наиболее безопасные стратегии управления транспортным средством. Использование оценок неопределенности позволяет системе не просто предвидеть столкновение, но и оценивать вероятность его наступления, что является ключевым фактором для реализации проактивных мер безопасности.
Для повышения надежности систем безопасности транспортных средств активно применяются методы сопоставления траекторий, такие как Динамическое Временное Выравнивание (DTW). DTW позволяет эффективно сравнивать последовательности движений, даже если скорость и временные интервалы различаются, что особенно важно при анализе реальных дорожных ситуаций. Параллельно, для создания разнообразных и реалистичных сценариев тестирования, используются Генеративно-состязательные сети (GAN). GAN способны синтезировать критические ситуации, которые сложно воспроизвести в реальных условиях или смоделировать традиционными способами, тем самым значительно расширяя возможности проверки и улучшения алгоритмов безопасности и обеспечивая более надежную работу систем в сложных условиях эксплуатации.
Представленная работа акцентирует внимание на выявлении аномалий в прогнозировании траекторий многоагентных систем, что соответствует идее о неизбежности изменений в любой системе. Как отмечал Андрей Колмогоров: «Математика — это искусство открывать закономерности в хаосе». Данное исследование, используя Transformer-модели, стремится не просто предсказать поведение агентов, но и обнаружить отклонения от нормы, которые могут сигнализировать о потенциальных рисках. По сути, работа направлена на выявление тех самых «закономерностей», скрытых в сложном потоке взаимодействий, и отделение их от случайных флуктуаций. Обнаружение аномалий, предложенное в статье, позволяет рассматривать системы не как статичные объекты, а как динамичные процессы, подверженные изменениям и требующие постоянного анализа.
Куда Ведет Дорога?
Представленная работа, как и любая попытка предсказать поведение сложных систем, выявляет не столько ответы, сколько новые грани неопределенности. Моделирование взаимодействия агентов — лишь приближение к хаосу реального мира, а выявление аномалий — это, скорее, поиск отклонений от статистической нормы, нежели истинных предвестников опасности. Технический долг, накопленный в алгоритмах, подобен эрозии: постепенно подтачивает надежность предсказаний, особенно в критических ситуациях.
Будущие исследования, вероятно, будут направлены на интеграцию физических моделей и данных, полученных из различных сенсоров. Аптайм системы, в конечном счете, — это редкая фаза гармонии во времени, и его поддержание требует постоянного внимания к деталям, а также признания неизбежности энтропии. Следует учитывать, что любая модель — это упрощение, и ее ценность заключается не в абсолютной точности, а в способности предоставлять полезную информацию для принятия решений.
По-настоящему сложная задача заключается не в предсказании траекторий, а в понимании намерений агентов и их адаптации к меняющимся условиям. Искусственный интеллект, стремящийся к безопасности, должен научиться не только видеть аномалии, но и оценивать контекст, в котором они возникают, признавая, что идеальной безопасности не существует, а цель — минимизировать риски, подобно опытному водителю, предвидящему развитие событий.
Оригинал статьи: https://arxiv.org/pdf/2601.20367.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- РИППЛ ПРОГНОЗ. XRP криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ЗЛОТОМУ
2026-01-29 21:33