Автор: Денис Аветисян
Исследователи предлагают инновационный подход к моделированию поведения участников дорожного движения, основанный на генеративных моделях и принципах агентного моделирования.

В статье представлена методика Generative Traffic Agents (GTA), объединяющая большие языковые модели и симуляцию транспортных потоков для создания реалистичных моделей мобильности и оценки градостроительных решений.
Прогнозирование транспортного поведения людей, определяемого сложным сочетанием личных предпочтений и общественных факторов, представляет собой серьезную проблему для городского планирования. В статье ‘GTA: Generative Traffic Agents for Simulating Realistic Mobility Behavior’ предложен новый подход, использующий генеративные агенты на основе больших языковых моделей для создания реалистичных сценариев транспортных потоков. Разработанный метод позволяет моделировать масштабные, контекстно-зависимые транспортные решения, основываясь на социодемографических данных и избегая ручной настройки правил. Какие перспективы открывает создание подобных моделей для оценки эффективности новых транспортных инноваций и оптимизации городской мобильности?
Реалистичное моделирование мобильности: Преодоление ограничений традиционных подходов
Традиционные модели транспортного потока зачастую основываются на упрощенных представлениях о поведении водителей, что приводит к неточностям в прогнозировании. Эти модели, как правило, предполагают, что все участники дорожного движения действуют рационально и предсказуемо, игнорируя индивидуальные особенности, эмоциональное состояние и реакцию на нештатные ситуации. Например, принятие решения о перестроении или скорости часто сводится к нескольким фиксированным параметрам, не учитывающим контекст, такой как плотность трафика, погодные условия или даже личные предпочтения водителя. В результате, симуляции, основанные на этих упрощениях, могут значительно отклоняться от реальной картины, что снижает их полезность для планирования городской инфраструктуры и разработки систем автономного вождения. Недооценка вариативности человеческого поведения становится критической ошибкой при моделировании сложных транспортных потоков.
Существующие агент-ориентированные модели (АОМ) часто оказываются недостаточно чувствительными к разнообразию индивидуальных мотиваций и контекстуальных реакций. В традиционных АОМ каждый агент, как правило, действует по упрощенным, заранее заданным правилам, игнорируя тонкие нюансы, определяющие реальное поведение человека. Например, решение о выборе маршрута может зависеть не только от расстояния и времени в пути, но и от личных предпочтений, спешки, настроения или даже текущих новостей. Отсутствие способности учитывать эти факторы приводит к тому, что моделирование транспортных потоков становится неточным и не способно адекватно отражать реальные сценарии. В результате, прогнозы о загруженности дорог, эффективности транспортной инфраструктуры и влиянии различных факторов на мобильность оказываются ненадежными, ограничивая возможности эффективного городского планирования и разработки систем автономного вождения.
В современных условиях, потребность в реалистичных и понятных моделях транспортных потоков становится все более актуальной, особенно в контексте динамичного развития городов и внедрения технологий автономного вождения. Традиционные методы моделирования часто оказываются недостаточными для адекватного прогнозирования поведения участников дорожного движения в сложных ситуациях. Точное предсказание транспортных потоков необходимо для эффективного городского планирования, оптимизации инфраструктуры и снижения транспортной загруженности. Кроме того, достоверные симуляции играют ключевую роль в разработке и тестировании систем автономного вождения, обеспечивая безопасность и надежность этих технологий в реальных условиях эксплуатации. В связи с этим, создание моделей, способных учитывать множество факторов, влияющих на поведение водителей, и предоставлять интерпретируемые результаты, является важной задачей для исследователей и разработчиков.
Для точного моделирования сложных взаимодействий в транспортных потоках необходим переход к агентам, способным к рассуждению об окружающей среде. Традиционные модели часто оперируют усредненными данными о поведении водителей, игнорируя индивидуальные особенности и контекст. Новые подходы предполагают создание «умных» агентов, которые не просто реагируют на стимулы, но и анализируют ситуацию, прогнозируют последствия своих действий и принимают решения, основываясь на собственных целях и ограничениях. Это требует интеграции алгоритмов искусственного интеллекта, позволяющих агентам оценивать риски, выбирать оптимальные маршруты и адаптироваться к меняющимся условиям дорожного движения, приближая виртуальную симуляцию к реальному поведению участников дорожного движения и открывая новые возможности для планирования городской инфраструктуры и разработки систем автономного вождения.
Генеративные агенты трафика: Новый взгляд на моделирование мобильности
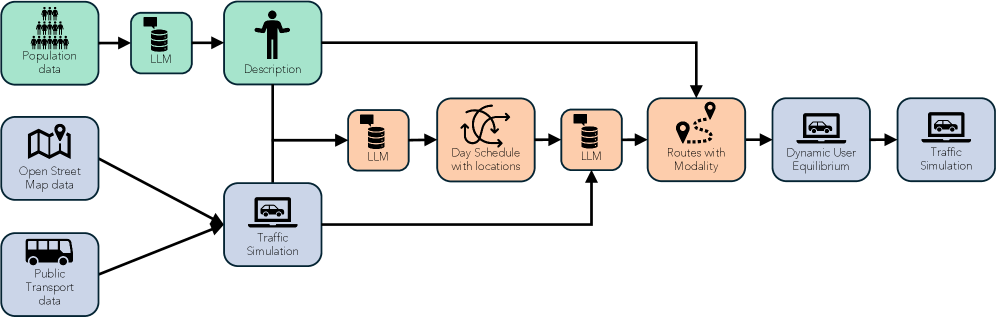
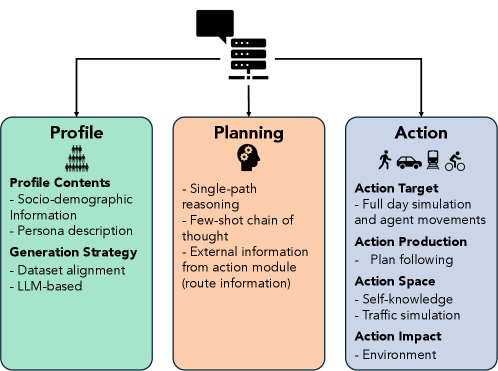
Метод Generative Traffic Agents (GTA) представляет собой подход к созданию реалистичных симуляций мобильности, основанный на использовании микроданных, соответствующих данным переписи населения. GTA использует статистические данные о населении, такие как возраст, пол, образование, место работы и транспортные предпочтения, для формирования индивидуальных профилей агентов. Эти профили затем используются для моделирования поведения каждого агента в транспортной сети, обеспечивая более точное и детализированное представление реальных транспортных потоков и паттернов мобильности. Использование данных переписи позволяет создавать симуляции, отражающие демографическую структуру и социально-экономические характеристики конкретного региона или города.
Генеративные агенты трафика (GTA) используют технологию больших языковых моделей (LLM) для создания персонализированных агентов, способных к контекстному рассуждению. LLM позволяют генерировать профили агентов, включающие характеристики, предпочтения и историю, что позволяет им принимать решения, основанные не только на текущей ситуации, но и на индивидуальных особенностях. В отличие от традиционных подходов, где поведение агентов определяется жестко заданными правилами, GTA позволяет агентам учитывать контекст окружающей среды и предыдущий опыт, что приводит к более реалистичному и правдоподобному моделированию транспортных потоков. Это достигается за счет использования LLM для генерации текстовых описаний ситуаций и последующего анализа этих описаний агентами, что позволяет им выбирать наиболее подходящие действия в соответствии с их профилем и контекстом.
Метод Generative Traffic Agents (GTA) создает более детализированное и правдоподобное моделирование мобильности за счет объединения индивидуальных профилей агентов с информацией об окружающей среде. В отличие от традиционных подходов, GTA использует данные о личных характеристиках каждого агента — например, возраст, род занятий, наличие автомобиля — и сопоставляет их с текущей обстановкой, включая дорожную ситуацию, время суток и погодные условия. Такое сочетание позволяет агентам принимать решения, соответствующие их профилю и контексту, что приводит к более реалистичному поведению в симуляции и повышает ее точность при моделировании транспортных потоков и поведения участников дорожного движения.
В отличие от традиционных моделей агентного моделирования (ABM), где поведение агентов определяется жесткими правилами и параметрами, Generative Traffic Agents (GTA) позволяют агентам обосновывать свои решения. Это достигается за счет использования больших языковых моделей (LLM), которые генерируют объяснения, основанные на профиле агента и контексте окружающей среды. Такой подход предоставляет возможность не только моделировать транспортные потоки, но и анализировать причины, лежащие в основе принятых агентами решений, что значительно повышает интерпретируемость результатов моделирования и облегчает валидацию поведения агентов в сложных сценариях.
Валидация и точность: Подтверждение соответствия модели реальности
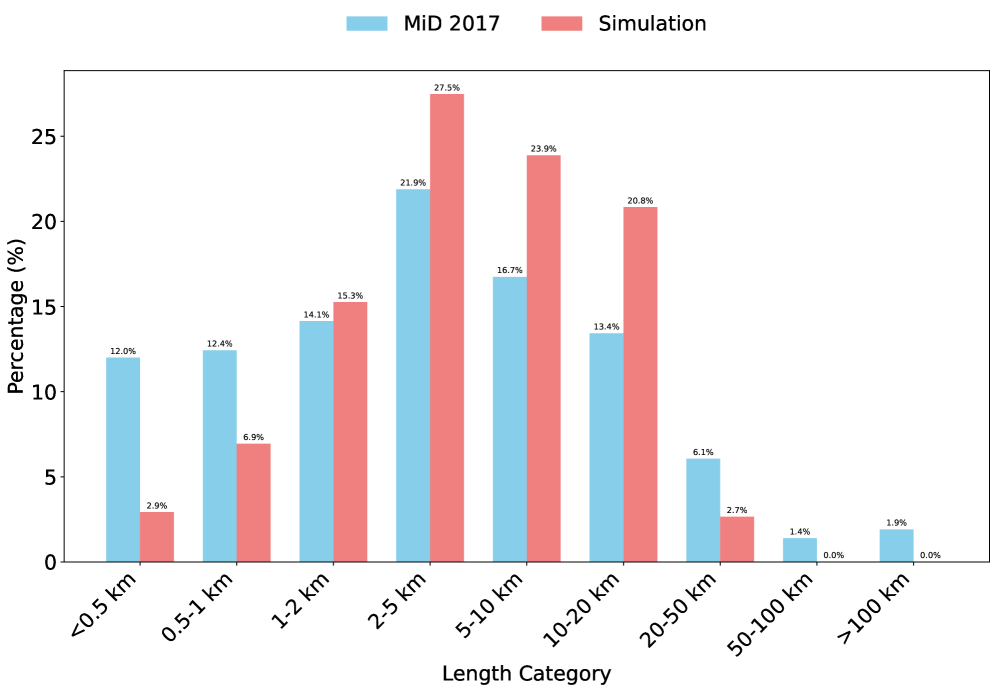
Симуляции GTA подвергаются строгой валидации на основе данных из набора ‘Mobility in Germany 2017’, что обеспечивает высокую точность и надежность моделирования. В процессе валидации сравниваются ключевые показатели, такие как модальный сплит и продолжительность поездок, с эмпирическими данными из обследования. Это позволяет оценить соответствие симулируемых транспортных потоков и поведения участников движения реальным условиям в Германии, подтверждая пригодность GTA для проведения исследований в области мобильности и транспортного планирования.
Для моделирования движения транспортных средств и организации дорожного потока в генерируемой среде используется платформа микроскопической транспортной симуляции SUMO. Интеграция с SUMO позволяет детально воспроизводить поведение отдельных автомобилей, учитывать различные параметры дорожной сети и реалистично моделировать взаимодействие между транспортными средствами. Это обеспечивает возможность анализа транспортных потоков, оценки пропускной способности дорог и тестирования различных сценариев дорожного движения в виртуальной среде, что критически важно для валидации и повышения точности симуляции GTA.
В симуляторе GTA используется принцип Динамического Пользовательского Равновесия (Dynamic User Equilibrium, DUE) в платформе SUMO для моделирования поведения участников дорожного движения. Этот принцип позволяет агентам (транспортным средствам) динамически адаптировать свои маршруты в ответ на изменяющиеся условия дорожного движения, такие как пробки и заторы. В отличие от статических моделей, где маршруты определяются заранее, DUE обеспечивает реалистичное поведение, при котором агенты выбирают оптимальные маршруты, минимизируя свои затраты на время в пути, учитывая текущую загруженность сети. Это приводит к более правдоподобному распределению трафика и повышает точность симуляции, поскольку позволяет моделировать эффекты самоорганизации и адаптации в транспортной системе.
При валидации симуляции GTA на соответствие реальным данным о мобильности в Германии в 2017 году, была достигнута среднеквадратическая ошибка (RMSE) в 4.07 при сравнении долей различных видов транспорта (modal split) с данными эмпирических опросов. При сравнении продолжительности междурегиональных поездок, RMSE для GTA составила 6.07, что выше среднего значения RMSE в 3.58 для других федеральных земель Германии. Аналогично, RMSE для длины поездок составила 6.12, в то время как для других земель этот показатель равен 1.87. Данные показатели демонстрируют высокую степень соответствия симуляции реальным моделям мобильности, хотя и указывают на некоторые расхождения в оценке продолжительности и длины поездок.
За пределами симуляции: Влияние на развитие интеллектуальных транспортных систем
Уникальная особенность разработанной системы заключается в способности генерировать объяснения на естественном языке, обосновывающие действия виртуальных водителей. Это позволяет исследователям не просто наблюдать за поведением агентов в смоделированных ситуациях, но и понимать почему они принимают те или иные решения. Анализ этих лингвистических обоснований открывает новые возможности для изучения когнитивных процессов, лежащих в основе управления транспортным средством, и выявления закономерностей в принятии решений водителями в различных дорожных условиях. Такой подход значительно превосходит традиционные методы анализа данных, предоставляя ценную информацию о мотивациях и стратегиях поведения, что, в свою очередь, способствует созданию более реалистичных и безопасных систем автономного управления и совершенствованию инфраструктуры дорожного движения.
Повышенная интерпретируемость, обеспечиваемая новой системой, позволяет проводить более эффективную оценку стратегий управления транспортными потоками и усовершенствования инфраструктуры. Традиционные методы часто сталкиваются с трудностями при объяснении причин тех или иных решений в симулированной среде. В отличие от них, данная разработка предоставляет детальное обоснование каждого действия, позволяя исследователям и инженерам не просто наблюдать результаты, но и понимать логику, лежащую в основе этих результатов. Это, в свою очередь, открывает возможности для более точной калибровки моделей, выявления слабых мест в существующих системах и прогнозирования влияния предлагаемых изменений на общую эффективность транспортной сети. Возможность детального анализа решений позволяет оптимизировать планирование дорожных работ, внедрять интеллектуальные системы управления трафиком и, в конечном итоге, создавать более безопасную и удобную транспортную среду.
Разработанная платформа предоставляет мощный инструмент для создания и испытания алгоритмов автономного вождения в условиях, приближенных к реальности, но при этом полностью контролируемых. В отличие от традиционных методов, требующих дорогостоящих и рискованных испытаний на дорогах общего пользования, данная система позволяет исследователям моделировать сложные дорожные ситуации, включая непредсказуемое поведение других участников движения и различные погодные условия. Это значительно ускоряет процесс разработки и валидации алгоритмов, позволяя выявлять и устранять потенциальные ошибки на ранних стадиях. Возможность точной настройки параметров симуляции и детального анализа поведения автономных систем делает платформу незаменимой для повышения безопасности и эффективности будущих транспортных решений.
Разрабатываемая платформа GTA призвана преодолеть разрыв между виртуальным моделированием и реальными дорожными условиями, открывая новые перспективы для развития транспортных систем. Используя возможности генерации естественного языка для обоснования действий агентов, система позволяет не только детально анализировать поведение водителей и процессы принятия решений, но и существенно повышает эффективность оценки стратегий управления трафиком и проектирования инфраструктуры. Такой подход создает мощный инструмент для разработки и тестирования алгоритмов автономного вождения в реалистичной и контролируемой среде, что в конечном итоге способствует созданию более безопасных, эффективных и экологически устойчивых транспортных систем будущего, способных адаптироваться к сложным и динамичным условиям современной городской среды.
Исследование, представленное в данной работе, демонстрирует элегантную простоту в решении сложной задачи моделирования мобильности. Авторы предлагают подход, объединяющий большие языковые модели и трафик-симуляцию для создания реалистичного поведения участников дорожного движения. Этот метод позволяет оценивать инновации в области городского планирования, основываясь на правдоподобных сценариях. В этом контексте особенно уместны слова Винтона Серфа: «Если решение слишком умное — оно, вероятно, хрупкое». Простота предложенного подхода — не недостаток, а его сила, обеспечивающая надежность и масштабируемость системы моделирования. Акцент на генеративных агентах, способных имитировать поведение отдельных участников дорожного движения, позволяет создавать целостную и правдоподобную картину городской мобильности.
Куда Ведет Дорога?
Представленный подход к моделированию транспортных потоков, основанный на генеративных агентах, демонстрирует элегантность, возникающую из простоты. Однако, подобно попытке пересадить сердце, не понимая всей системы кровообращения, и здесь остаются нерешенные вопросы. Создание правдоподобного поведения агентов — это лишь часть задачи. Истинным вызовом является интеграция этого поведения в комплексные модели городской среды, учитывающие не только перемещение, но и взаимодействие с инфраструктурой, экономикой и социальными процессами.
Очевидным направлением дальнейших исследований представляется разработка более тонких механизмов обучения агентов. Современные языковые модели способны генерировать убедительные нарративы, но часто им не хватает понимания причинно-следственных связей. Необходимо исследовать способы внедрения в них знаний о физических ограничениях, экономических стимулах и социальных нормах, формирующих мобильность. Иначе, рискуем получить красивые симуляции, оторванные от реальности.
В конечном счете, ценность подобного рода моделей заключается не в предсказании будущего, а в создании платформы для экспериментов. Возможность «проигрывать» различные сценарии развития городской среды, оценивать эффективность инноваций и выявлять потенциальные проблемы — это ключ к более осознанному и устойчивому градостроительству. Но помните: структура определяет поведение, и любая модель — это лишь упрощение сложной реальности.
Оригинал статьи: https://arxiv.org/pdf/2601.16778.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ЗЛОТОМУ
- РИППЛ ПРОГНОЗ. XRP криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- ПРОГНОЗ ЕВРО К ШЕКЕЛЮ
2026-01-27 00:48