Автор: Денис Аветисян
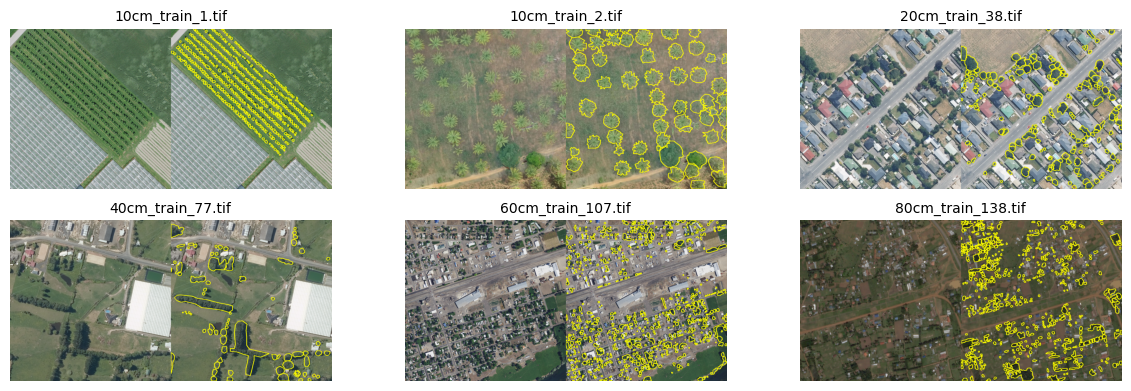
Новое исследование показывает, что современные нейросети могут эффективно распознавать кроны деревьев на изображениях, используя всего 150 образцов для обучения.
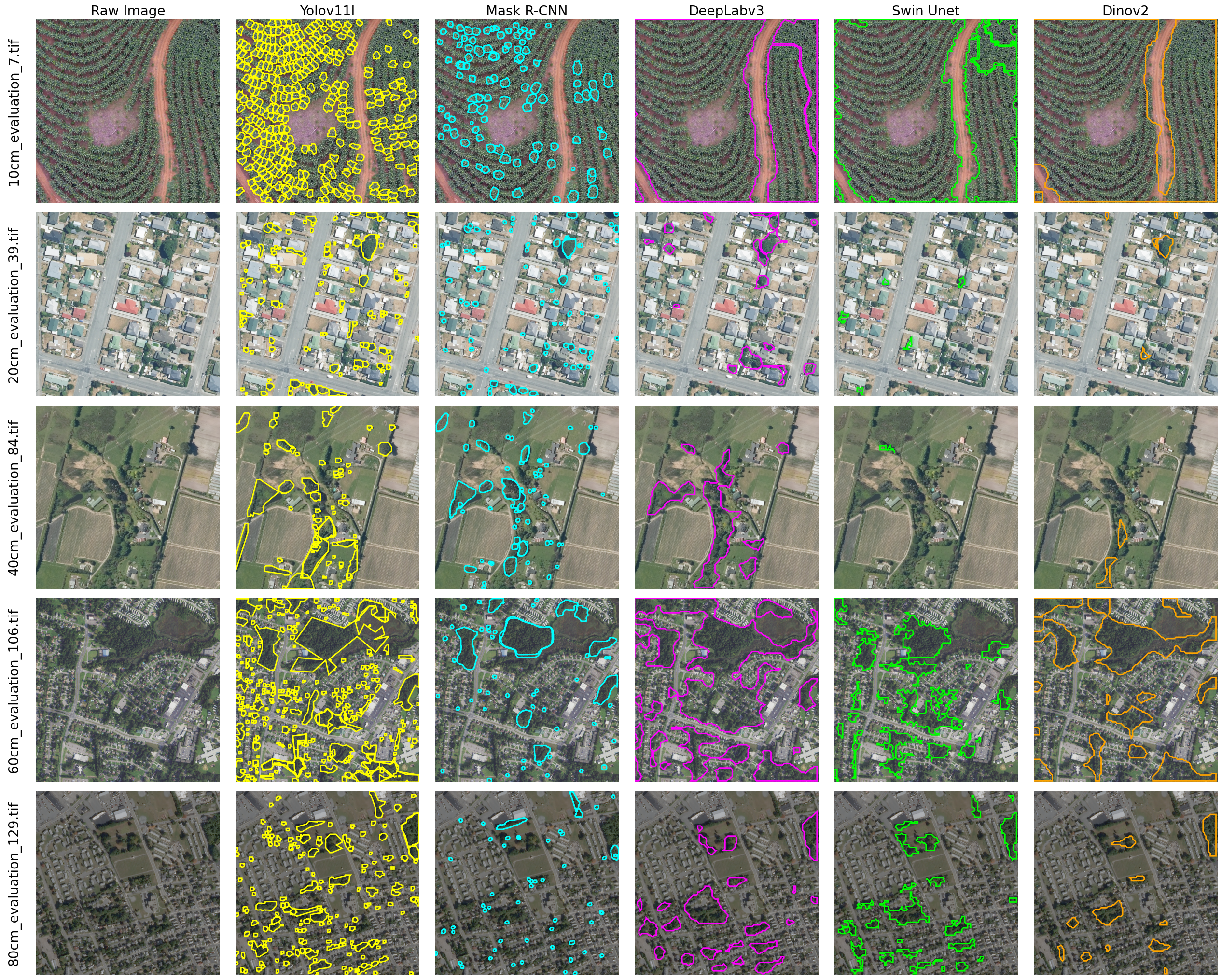
Сравнение CNN и Vision Transformers для сегментации крон деревьев в задачах дистанционного зондирования при ограниченном количестве данных.
Несмотря на значительный прогресс в области глубокого обучения, задача сегментации полога деревьев по данным аэрофотосъемки остается сложной при ограниченном количестве размеченных данных. В работе ‘Sparse Data Tree Canopy Segmentation: Fine-Tuning Leading Pretrained Models on Only 150 Images’ проведено сравнительное исследование пяти современных архитектур, включая сверточные нейронные сети и Vision Transformers, в условиях дефицита данных — всего 150 размеченных изображений. Полученные результаты показали, что предобученные сверточные модели, такие как YOLOv11 и Mask R-CNN, демонстрируют значительно лучшую обобщающую способность, чем предобученные transformer-based модели. Подтверждает ли это необходимость учета пространственных индуктивных смещений при обучении моделей для задач дистанционного зондирования с ограниченным объемом данных?
Ограниченные Данные, Сложные Сцены: Вызовы Обнаружения Крон Деревьев
Точное определение границ крон деревьев по данным дистанционного зондирования имеет решающее значение для эффективного управления лесными ресурсами, однако эта задача осложняется недостатком размеченных данных. Получение достаточного количества точных меток для обучения алгоритмов машинного обучения требует значительных трудозатрат и экспертных знаний, что ограничивает возможности создания надежных и масштабируемых систем. Нехватка размеченных данных особенно критична при работе с изображениями высокого разрешения и сложными лесными ландшафтами, где кроны деревьев могут перекрываться или быть частично скрыты другими объектами. Поэтому разработка методов, позволяющих достичь высокой точности определения границ крон при ограниченном количестве обучающих данных, является актуальной задачей современной лесной науки и технологий.
Традиционные методы обнаружения объектов в изображениях дистанционного зондирования, такие как алгоритмы, основанные на ручном определении признаков и классических моделях машинного обучения, часто демонстрируют ограниченную эффективность при анализе сложных природных сцен. Проблема заключается в том, что лесные массивы характеризуются высокой вариативностью текстур, освещения и взаимного перекрытия крон деревьев, что затрудняет автоматическое выделение границ и точную идентификацию каждого дерева. Для достижения приемлемой точности такие методы обычно требуют огромного объема размеченных данных, что является дорогостоящим и трудоемким процессом. Недостаток размеченных данных приводит к переобучению моделей, то есть они хорошо работают на обучающем наборе, но плохо обобщаются на новые, неизвестные изображения, что делает их непригодными для практического применения в лесоуправлении и мониторинге лесов.
Основная сложность в задаче обнаружения крон деревьев заключается в поиске оптимального баланса между сложностью используемой модели и ограниченностью доступных данных для обучения. Слишком сложная модель, обученная на небольшом наборе данных, рискует «переобучиться» — то есть, идеально адаптироваться к конкретному обучающему набору, но потерять способность к обобщению и корректной работе с новыми, незнакомыми изображениями. В то же время, чрезмерно упрощенная модель может оказаться неспособной уловить все нюансы и детали, необходимые для точного определения границ крон в сложных природных ландшафтах. Поэтому, разработка эффективных алгоритмов требует тщательного подбора архитектуры модели и методов регуляризации, позволяющих добиться высокой точности и устойчивости к переобучению даже при дефиците размеченных данных.
Использование Предварительного Обучения и Индуктивных Смещений для Надежной Сегментации
Предварительное обучение моделей на больших наборах данных позволяет переносить полученные представления, что значительно снижает потребность в обширной размеченной выборке для решения конкретных задач. Этот процесс, известный как transfer learning, заключается в использовании весов, полученных на большом неразмеченном корпусе, в качестве отправной точки для обучения модели на целевой задаче. В результате, модель быстрее сходится и требует меньше размеченных данных для достижения приемлемой точности, поскольку уже обладает базовым пониманием признаков и закономерностей, характерных для входных данных. Эффективность подхода зависит от размера и разнообразия предварительно обученного набора данных, а также от степени схожести между задачами предварительного обучения и целевой задачей.
Свёрточные нейронные сети (CNN) изначально обладают пространственными индуктивными смещениями, что означает, что их архитектура спроектирована таким образом, чтобы эффективно обрабатывать данные, имеющие пространственную структуру, например, изображения. Эти смещения проявляются в использовании свёрточных фильтров, которые выявляют локальные закономерности, и пулинга, который обеспечивает инвариантность к небольшим сдвигам и искажениям. В контексте сегментации, это позволяет CNN эффективно выделять признаки и классифицировать пиксели даже при ограниченном количестве обучающих примеров, поскольку сеть уже предварительно настроена на обнаружение релевантных пространственных характеристик, таких как края, углы и текстуры. Такой подход уменьшает потребность в огромных объемах размеченных данных для достижения приемлемой точности сегментации.
Несмотря на эффективность предварительного обучения и использования пространственных индуктивных смещений, методы сегментации изображений могут демонстрировать снижение производительности при обработке сложных сцен или данных с ограниченным разнообразием. Это связано с тем, что предварительно обученные модели, хоть и обладают общими представлениями об изображениях, могут испытывать трудности с обобщением на данные, существенно отличающиеся от тех, на которых они обучались. Ограниченное разнообразие обучающей выборки приводит к недостаточному охвату возможных вариаций в сложных сценах, что негативно сказывается на точности сегментации, особенно в отношении объектов или ситуаций, редко встречающихся в тренировочном наборе данных. В таких случаях требуется применение дополнительных техник, таких как аугментация данных или использование ансамблей моделей, для повышения робастности и точности сегментации.
Vision Transformers: Потенциал и Ограничения в Дистанционном Зондировании
Визуальные трансформаторы, такие как Swin-UNet и DINOv2, демонстрируют высокую эффективность в задачах семантической сегментации благодаря своим возможностям обучения представлений. В отличие от традиционных сверточных нейронных сетей, они используют механизм внимания, позволяющий модели учитывать глобальный контекст изображения и устанавливать связи между различными его частями. Это особенно важно для сложных сцен дистанционного зондирования, где объекты могут иметь разнообразные формы и размеры, а их границы — быть размытыми. Способность к обучению представлений позволяет этим моделям извлекать наиболее релевантные признаки из входных данных, что повышает точность и надежность сегментации.
Несмотря на потенциальные преимущества, модели Vision Transformer, такие как Swin-UNet и DINOv2, показали более низкий средневзвешенный показатель точности (weighted mAP) — 0.85 для Swin-UNet и 0.82 для DINOv2 и DeepLabV3 — на проверочном наборе данных. Этот результат указывает на значительную зависимость производительности моделей от объема и качества обучающей выборки, что особенно критично при работе с ограниченными наборами данных дистанционного зондирования. Низкий показатель mAP свидетельствует о том, что модели испытывают трудности с обобщением полученных знаний на новые, ранее не виденные данные, что ограничивает их применимость в реальных сценариях.
Эффективность Vision Transformers в задачах дистанционного зондирования напрямую зависит от качественной предварительной тренировки и применения методов регуляризации. Недостаточная предварительная тренировка может привести к переобучению модели на ограниченном наборе данных, снижая ее способность к обобщению и ухудшая производительность на новых, ранее не виденных изображениях. Методы регуляризации, такие как dropout, weight decay и data augmentation, помогают предотвратить переобучение, контролируя сложность модели и увеличивая устойчивость к шуму и вариациям во входных данных. Тщательный подбор параметров регуляризации и стратегии предварительной тренировки критически важен для достижения оптимальной производительности и обеспечения надежной работы Vision Transformers в реальных приложениях.
Баланс между Точностью и Полнотой: Сравнительный Анализ Производительности
Архитектура Mask R-CNN продемонстрировала впечатляющую эффективность в задачах сегментации экземпляров, даже при ограниченном объеме обучающих данных. В ходе тестирования на наборе данных Solafune модель достигла среднего значения точности (weighted mAP) в 0.22. Этот результат подтверждает преимущества надежных архитектур, способных эффективно извлекать признаки и точно определять границы объектов, несмотря на дефицит данных для обучения. Способность Mask R-CNN к точной сегментации даже в условиях ограниченных ресурсов делает ее перспективным инструментом для различных приложений, где получение большого количества размеченных данных затруднено или невозможно.
Несмотря на приемлемые результаты в задаче семантической сегментации, модель DeepLabv3 продемонстрировала сложности с точным определением границ объектов. Анализ производительности на тестовом наборе Solafune выявил, что средняя точность обнаружения (mAP) составила лишь 0.038, в то время как общая точность пикселей достигла 0.82. Это указывает на то, что, хотя модель способна классифицировать пиксели верно, она испытывает трудности с четким разграничением отдельных экземпляров объектов на изображении, что снижает её эффективность в задачах, требующих высокой точности локализации.
Модель YOLOv11 продемонстрировала выдающиеся результаты в задачах обнаружения объектов, достигнув наивысшей конкурентоспособной производительности на тестовом наборе данных Solafune. Благодаря широкому предварительному обучению, она обеспечила не только высокую точность обнаружения, зафиксированную показателем взвешенного среднего значения точности mAP = 0.281, но и эффективную работу, что делает её надежным базовым уровнем для дальнейших сравнений и исследований в области компьютерного зрения. Данная архитектура, сочетающая в себе скорость и точность, представляет значительный прогресс в решении задач, требующих быстрого и надежного определения объектов на изображениях.
К Надежному Обнаружению Крон Деревьев: Перспективы и Будущие Направления
Дальнейшие исследования в области обнаружения крон деревьев должны быть сосредоточены на разработке методов увеличения объема данных и стратегий переноса обучения для повышения способности моделей к обобщению, особенно при ограниченном количестве обучающих примеров. Недостаток размеченных данных является серьезной проблемой, и такие техники, как случайные повороты, масштабирование, изменение яркости и добавление шума, могут искусственно увеличить размер обучающей выборки. Кроме того, применение переноса обучения, когда модель, предварительно обученная на большом наборе данных для смежной задачи, адаптируется к задаче обнаружения крон, позволяет использовать знания, полученные на других данных, и снизить потребность в большом количестве размеченных данных, что особенно важно для регионов с ограниченными ресурсами или специфическими типами растительности.
Исследования направлены на повышение точности обнаружения крон деревьев за счет внедрения расширенных свёрток и пространственной пирамиды отчужденных свёрток, аналогичных используемым в архитектуре DeepLabv3. Данные методы позволяют эффективно захватывать многомасштабную информацию, что особенно важно для анализа изображений с различным разрешением и углом обзора. Использование отчужденных свёрток позволяет увеличить поле восприятия нейронной сети без потери пространственного разрешения, а пространственная пирамида отчужденных свёрток обрабатывает входные данные с использованием различных скоростей отчуждения, что повышает устойчивость к изменениям масштаба объектов. Интеграция этих техник в более надежные архитектуры, вероятно, позволит добиться значительного улучшения результатов обнаружения крон деревьев, особенно в сложных условиях, таких как густая растительность или перекрывающиеся кроны.
Для всесторонней оценки эффективности моделей при обнаружении крон деревьев необходимо последовательно использовать как метрику пиксельной точности, так и среднюю точность (mAP). Пиксельная точность позволяет оценить, насколько правильно модель классифицирует каждый пиксель изображения, однако она может быть недостаточной при несбалансированности классов — например, когда площадь крон деревьев значительно меньше площади фона. В свою очередь, mAP учитывает точность и полноту обнаружения объектов (в данном случае, крон), что позволяет получить более объективную картину производительности модели, особенно в сложных сценариях с перекрывающимися кронами или высокой плотностью растительности. Комбинированное использование этих метрик обеспечивает более полное понимание сильных и слабых сторон различных подходов к обнаружению крон деревьев и позволяет более эффективно направлять дальнейшие исследования в этой области.
Исследование демонстрирует, что в условиях ограниченных данных для дистанционного зондирования, пространственные индуктивные смещения, присущие сверточным нейронным сетям, играют решающую роль в точном определении границ крон деревьев. Это особенно заметно при сравнении с архитектурами Vision Transformer, которые, несмотря на свою эффективность в задачах с большим объемом данных, уступают CNN в сценариях с небольшим набором обучающих примеров. Как точно заметила Фэй-Фэй Ли: «Искусственный интеллект должен быть ориентирован на людей, а не наоборот». Эта идея находит отражение в данной работе, поскольку оптимизация моделей для работы с ограниченными данными делает технологии дистанционного зондирования более доступными и эффективными для широкого круга пользователей, предоставляя ценную информацию о состоянии окружающей среды.
Что дальше?
Представленные результаты, несомненно, подчеркивают важность пространственных априорных знаний, заключенных в сверточных нейронных сетях, при работе с ограниченными наборами данных дистанционного зондирования. Однако, эйфория от превосходства CNN над Vision Transformers не должна заслонять собой более глубокие вопросы. Успех YOLOv11 и Mask R-CNN в данной задаче, скорее, говорит о слабости Vision Transformers в экстраполяции на сценарии с дефицитом данных, нежели об абсолютном превосходстве CNN. Необходимо дальнейшее исследование механизмов, позволяющих Vision Transformers эффективно использовать небольшие наборы данных, возможно, через разработку новых архитектур или методов обучения, учитывающих специфику пространственной информации.
Очевидно, что 150 изображений — это лишь отправная точка. Будущие исследования должны быть направлены на оценку обобщающей способности представленных моделей на более крупных и разнообразных наборах данных, а также на их адаптацию к различным типам ландшафтов и условиям освещения. Особое внимание следует уделить разработке методов аугментации данных, способных эффективно компенсировать недостаток обучающих примеров, не внося при этом искусственных артефактов.
В конечном счете, элегантность решения заключается не в достижении максимальной точности на ограниченном наборе данных, а в создании модели, способной к адаптации и обобщению, сохраняя при этом свою функциональность и эффективность в реальных условиях. Задача не в том, чтобы заставить алгоритм «увидеть» деревья на 150 изображениях, а в том, чтобы он мог распознать их в любом уголке земного шара.
Оригинал статьи: https://arxiv.org/pdf/2601.10931.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- РИППЛ ПРОГНОЗ. XRP криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- FARTCOIN ПРОГНОЗ. FARTCOIN криптовалюта
2026-01-21 05:00