Прогноз курса Bitcoin: Новый подход на основе глубокого обучения
Исследователи предлагают гибридную нейронную сеть, объединяющую Temporal Fusion Transformers, Attention-BiLSTMs и XGBoost, для повышения точности прогнозирования стоимости Bitcoin.
Исследователи предлагают гибридную нейронную сеть, объединяющую Temporal Fusion Transformers, Attention-BiLSTMs и XGBoost, для повышения точности прогнозирования стоимости Bitcoin.
![Модель, использующая трехмерные свёрточные слои с дилатацией, ступенчато снижает размерность входных данных [latex]512 \times 32 \times 32 \times 15[/latex] до единичного значения, применяя дилатацию в степени двойки для уменьшения первой размерности вдвое при каждом вызове и выдавая в итоге некалиброванный балл аномалии.](https://arxiv.org/html/2602.12408v1/x3.png)
Новая архитектура глубокого обучения позволяет выявлять необычные изменения в сейсмической активности, предсказывая потенциальные опасные зоны.
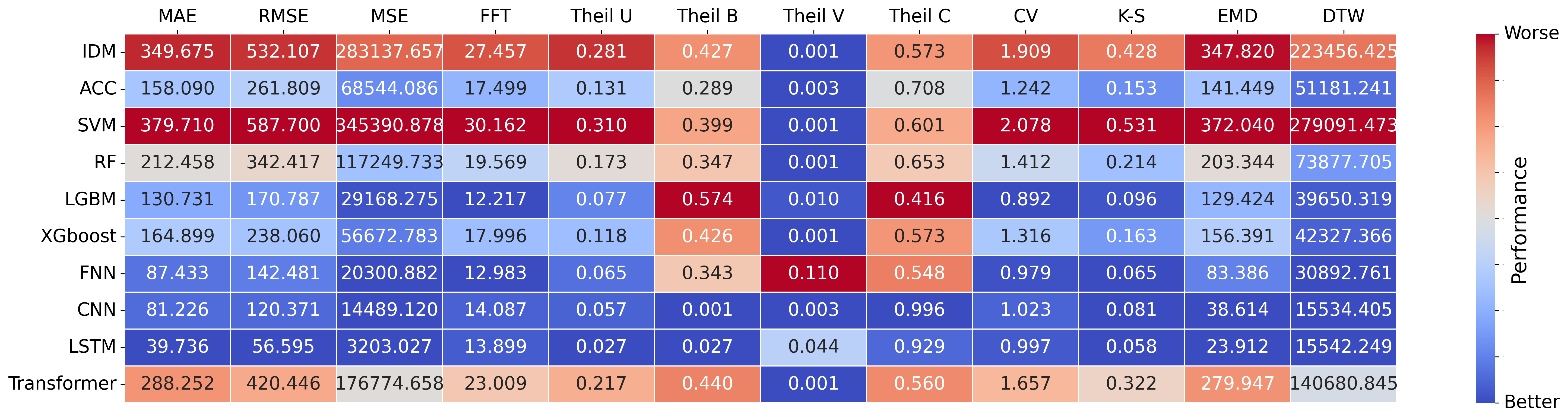
Новое исследование предлагает эффективный метод калибровки и оценки моделей управления движением для автономных шаттлов, повышая безопасность и реалистичность симуляций.
![В разработанной системе TRACER оценка неопределенности траектории при логических рассуждениях агента осуществляется путем вычисления и комбинирования показателей, таких как степень удивления от контента, повторение действий агента, расхождение между действиями и наблюдениями, а также разрыв в координации между агентом и пользователем, посредством максимизации рисков на каждом шаге [latex]r\_{t}=\max(U\_{t},\alpha D\_{a}(t),\beta D\_{o}^{A}(t),\gamma D\_{o}^{U}(t))[latex], после чего агрегирование рисков траектории осуществляется с акцентом на хвост распределения, используя усреднение по верхним K значениям и [latex]\ell\_{\in fty}[latex]-норму.](https://arxiv.org/html/2602.11409v1/figures/overview.png)
Новый подход позволяет оценивать вероятность неудачи сложных систем, принимающих решения в несколько этапов, фокусируясь на анализе возможных траекторий развития событий.
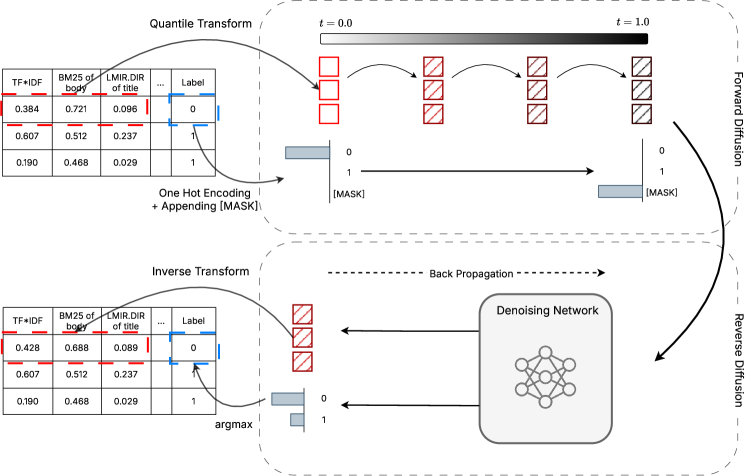
Исследователи предлагают инновационный подход к задаче ранжирования, основанный на генеративных моделях и принципах шумоподавления.