Автор: Денис Аветисян
Исследователи предлагают инновационную систему, способную обнаруживать критические отклонения в работе беспилотных автомобилей, обеспечивая повышенную безопасность и надежность.
Предложен алгоритм Deep-Flow, использующий непрерывные нормализующие потоки на спектральных многообразиях для обнаружения аномалий в автономном вождении без использования размеченных данных.
Несмотря на прогресс в области автономного вождения, обеспечение безопасности систем остается сложной задачей, особенно в отношении редких, но критически важных сценариев. В работе «Conditional Flow Matching for Continuous Anomaly Detection in Autonomous Driving on a Manifold-Aware Spectral Space» представлен Deep-Flow — новый подход, использующий непрерывные нормализующие потоки на спектральных многообразиях для выявления аномалий в поведении автономных транспортных средств. Данный фреймворк, в отличие от традиционных методов, позволяет не только обнаруживать опасные ситуации, но и выявлять предсказуемость поведения, определяя пробелы в существующих системах безопасности. Может ли Deep-Flow стать основой для создания объективных, данных-ориентированных критериев оценки безопасности и, тем самым, ускорить внедрение автономных транспортных средств?
Прогнозирование траекторий: вызов для автономного вождения
Точность прогнозирования траекторий других участников дорожного движения имеет решающее значение для обеспечения безопасности автономного вождения, однако стандартные методы зачастую демонстрируют неудовлетворительные результаты в редких, но критически важных ситуациях. Например, при неожиданном появлении пешехода или резком маневре другого автомобиля, существующие алгоритмы могут ошибочно предсказать дальнейшие действия, что приводит к потенциально опасным ситуациям. Проблема усугубляется тем, что обучение этих алгоритмов на стандартных наборах данных, где преобладают обычные сценарии, не позволяет им адекватно реагировать на нетипичные и сложные дорожные ситуации, требующие быстрой и точной оценки рисков.
Традиционные методы прогнозирования траекторий, в частности, авторегрессионные модели, зачастую демонстрируют склонность к накоплению ошибок, известной как “дрифт”. Данное явление приводит к постепенному отклонению прогнозов от реальных траекторий, особенно в долгосрочной перспективе и в сложных дорожных ситуациях. Более того, эти модели, как правило, фокусируются на наиболее вероятном сценарии, игнорируя широкий спектр возможных действий водителя или пешехода. В результате, они не способны адекватно оценить неопределенность, присущую динамичному окружению, и могут упустить критически важные, хотя и менее вероятные, варианты развития событий, что существенно снижает надежность систем автономного вождения.
В сложных дорожных условиях, где поведение участников движения подвержено множеству факторов, необходимо использовать генеративные модели для прогнозирования траекторий. Такие модели, в отличие от традиционных, способны учитывать присущую этим условиям неопределенность, а не просто экстраполировать наиболее вероятное развитие событий. Вместо предоставления единственного прогноза, генеративный подход позволяет создать распределение вероятностей различных траекторий, отражая все возможные варианты развития ситуации. Это критически важно для систем автономного вождения, поскольку позволяет заранее оценить риски и своевременно принять меры для предотвращения аварийных ситуаций, даже если они связаны с редкими и непредсказуемыми сценариями.
Deep-Flow: Рамка обнаружения аномалий на основе генеративных моделей
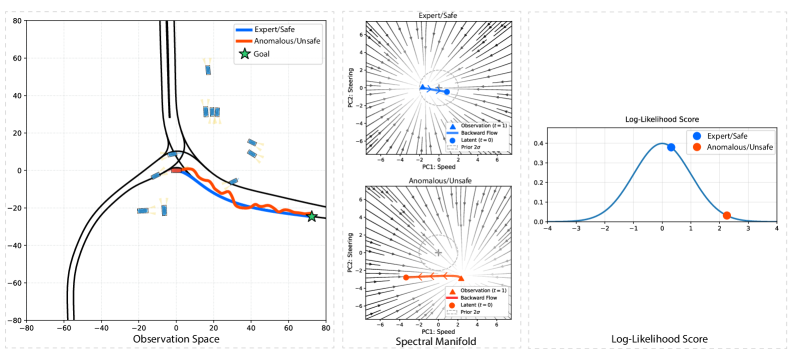
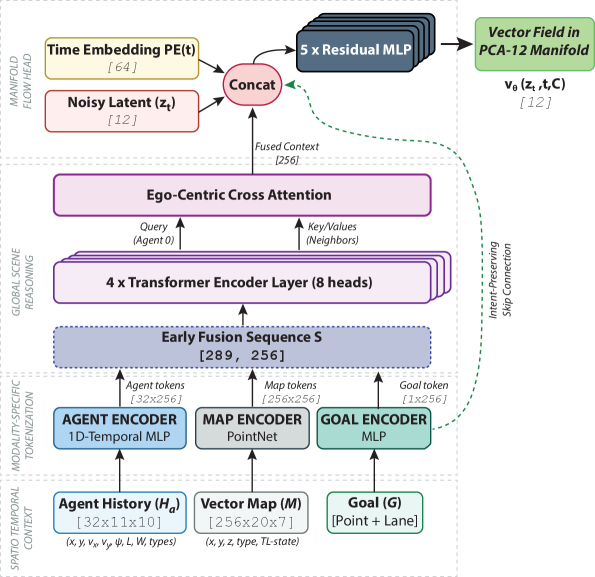
Deep-Flow использует непрерывные нормализующие потоки (Continuous Normalizing Flows, CNF) для построения устойчивой генеративной модели нормального поведения транспортных средств. CNF позволяют моделировать сложное распределение вероятностей траекторий движения, что дает возможность оценивать правдоподобие наблюдаемых траекторий. В отличие от дискретных нормализующих потоков, CNF используют непрерывные преобразования, что обеспечивает более плавное и точное моделирование динамики движения. Оценка правдоподобия траектории осуществляется путем вычисления плотности вероятности этой траектории под полученной генеративной моделью; низкое значение плотности вероятности указывает на аномальное поведение. Эффективность CNF в данном контексте обусловлена их способностью моделировать сложные зависимости в данных и генерировать реалистичные траектории, что критически важно для точного обнаружения аномалий.
В архитектуре Deep-Flow реализован Spectral Manifold Bottleneck, использующий метод главных компонент (PCA) для снижения размерности входных данных о траекториях. Это позволяет уменьшить вычислительную сложность модели и повысить её эффективность. Применение PCA также способствует обеспечению кинематической гладкости моделируемых траекторий, поскольку алгоритм фокусируется на наиболее значимых компонентах, определяющих движение транспортного средства. Снижение размерности и акцент на кинематической гладкости совместно приводят к более реалистичному и точному моделированию поведения транспортного средства, что критически важно для выявления аномалий.
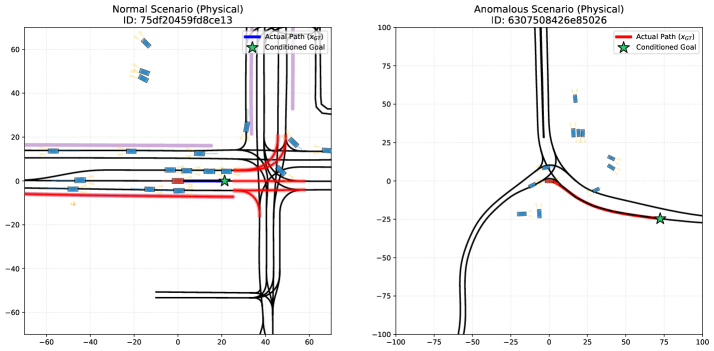
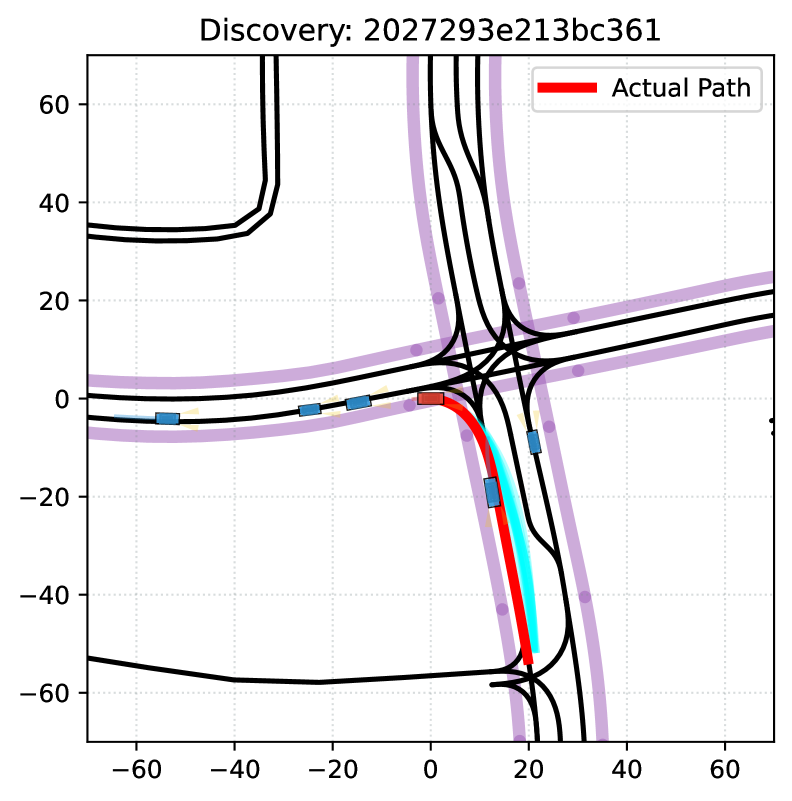
Успех Deep-Flow обусловлен интеграцией обусловливания целевой полосой движения (Goal-Lane Conditioning) и взвешивания кинематической сложности (Kinematic Complexity Weighting). Обусловливание целевой полосой движения позволяет моделировать траектории, учитывая намерения водителя и предсказуемость его действий, что особенно важно для прогнозирования маневров. Взвешивание кинематической сложности акцентирует внимание модели на более реалистичных и безопасных траекториях, минимизируя вероятность генерации неестественных или рискованных сценариев. Этот подход позволяет эффективно разрешать неоднозначность в критических точках принятия решений, таких как перестроения и повороты, и приоритизировать изучение маневров, связанных с обеспечением безопасности движения.
Эффективная оценка правдоподобия с Deep-Flow
Вычисление логарифмической функции правдоподобия (log-likelihood) в контексте нормализующих потоков на основе обыкновенных дифференциальных уравнений (CNF) требует решения ODE на каждом шаге процесса генерации. Этот процесс включает численное интегрирование ODE вдоль траектории, что является вычислительно затратной операцией, особенно при высокой размерности пространства состояний и большом количестве шагов интегрирования. Сложность вычислений возрастает пропорционально размерности и количеству шагов, что делает точную оценку логарифмической функции правдоподобия ресурсоемкой задачей, критичной для эффективного обучения и оценки моделей CNF.
Методология Deep-Flow обеспечивает эффективную оценку правдоподобия, отказавшись от использования оценки следа Хатчинсона (Hutchinson’s Trace Estimator). Традиционно, оценка следа требует большого количества случайных выборок, что является вычислительно затратным. Deep-Flow оптимизирует вычисление правдоподобия напрямую, что позволяет значительно сократить время вычислений и повысить точность оценки аномалий. Это достигается за счет \text{более эффективного вычисления детерминанта якобиана} в процессе решения обыкновенных дифференциальных уравнений (ODE), необходимых для вычисления логарифмической вероятности в контексте нормализующих потоков (CNF). Оптимизация вычислений непосредственно влияет на точность оценки аномалий, что критически важно для надежного обнаружения отклонений от нормального поведения.
Полученный показатель аномалии (Anomaly Score) количественно оценивает вероятность отклонения траектории от изученного распределения нормального поведения. Это достигается путем вычисления плотности вероятности траектории в рамках модели, обученной на данных нормального функционирования. Более низкое значение p(x) указывает на более высокую вероятность того, что траектория отклоняется от нормального поведения, что позволяет эффективно выявлять аномалии. Чувствительность и точность обнаружения аномалий напрямую зависят от способности модели корректно оценивать вероятность отклонения траекторий от нормального распределения, что обеспечивает надежное и устойчивое обнаружение аномалий в различных сценариях.
Валидация и производительность на наборе данных Waymo
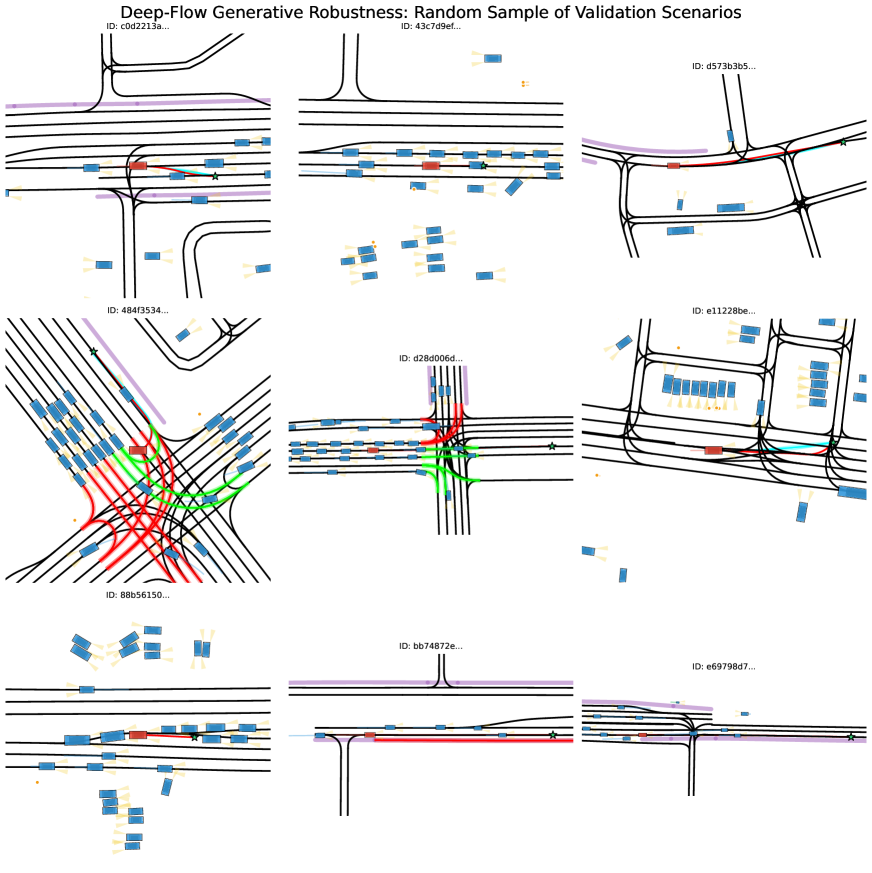
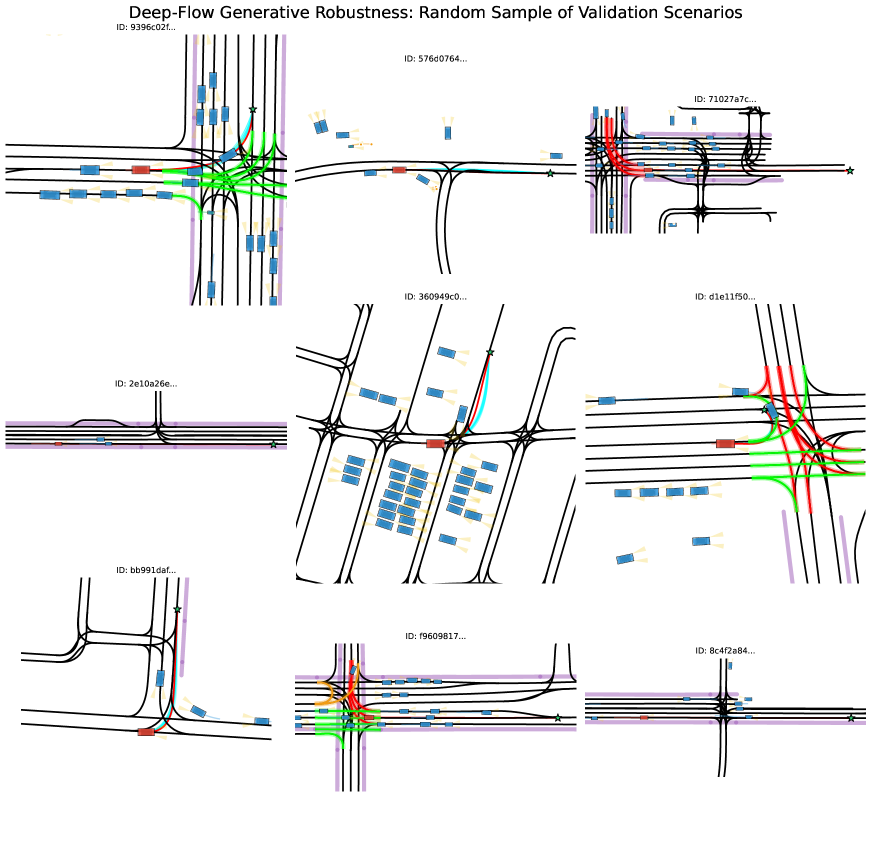
Исследование Deep-Flow было проведено на датасете Waymo Open Motion Dataset (WOMD), что позволило продемонстрировать высокую точность выявления аномальных траекторий движения транспортных средств в сложных городских условиях. Особое внимание уделялось способности системы обнаруживать отклонения от нормального поведения в ситуациях с высокой плотностью движения, пешеходами и другими препятствиями. Результаты показали, что Deep-Flow эффективно справляется с анализом динамических сцен, что критически важно для обеспечения безопасности автономных транспортных средств. Способность модели к точному распознаванию аномалий подтверждает ее потенциал в качестве надежного компонента систем предотвращения столкновений и повышения общей безопасности дорожного движения.
Для оценки эффективности модели Deep-Flow в обнаружении аномальных траекторий, была проведена валидация на датасете Waymo Open Motion Dataset (WOMD). Количественная оценка производительности осуществлялась с использованием метрики AUC-ROC, которая достигла значения 0.766 при идентификации критически важных для безопасности событий. Данный результат демонстрирует значительное превосходство Deep-Flow над существующими методами в области прогнозирования опасных ситуаций на дорогах, подтверждая её потенциал для повышения надёжности и безопасности систем автономного вождения. Полученное значение AUC-ROC указывает на высокую способность модели различать нормальные и аномальные траектории движения транспортных средств в сложных городских условиях.
Полученные результаты валидации подтверждают значительный потенциал Deep-Flow в повышении безопасности и надежности систем автономного вождения. Достоверное выявление аномальных траекторий, продемонстрированное на сложном наборе данных Waymo Open Motion Dataset, позволяет предположить, что данная модель способна существенно снизить риски возникновения опасных ситуаций на дороге. Высокая точность обнаружения критических событий, подтвержденная метрикой AUC-ROC, указывает на возможность интеграции Deep-Flow в существующие системы для улучшения их способности предвидеть и предотвращать аварии, что, в конечном итоге, способствует более безопасному и предсказуемому движению автономных транспортных средств в реальных городских условиях.
Перспективы развития: к целостному пониманию сцены
Несмотря на то, что Deep-Flow демонстрирует высокую эффективность в моделировании аномалий траекторий отдельных участников движения, дальнейшие исследования направлены на интеграцию этой системы с моделями, учитывающими взаимодействие между агентами, такими как поля социальных сил. Данный подход позволит выйти за рамки анализа изолированных траекторий и перейти к пониманию сцены в целом, учитывая взаимное влияние транспортных средств и пешеходов. Интеграция с моделями социальных сил позволит прогнозировать поведение участников движения, основываясь не только на их индивидуальных траекториях, но и на предполагаемых намерениях и реакциях на действия других агентов. Такое комплексное моделирование необходимо для создания более надежных и предсказуемых систем автономного вождения, способных эффективно функционировать в сложных городских условиях.
Интеграция модели Deep-Flow с моделями взаимодействия агентов, такими как поля социальных сил, позволит перейти к более целостному пониманию сложных дорожных ситуаций. Вместо анализа отдельных траекторий, система сможет учитывать намерения и поведение множества участников движения — автомобилей, пешеходов и велосипедистов. Это достигается путем моделирования сил, влияющих на каждого агента, и прогнозирования их действий на основе этих сил и текущей обстановки. Такой подход не просто фиксирует аномалии, но и объясняет их, позволяя системе предвидеть потенциальные конфликты и принимать более обоснованные решения, что критически важно для надежной работы автономных транспортных средств в динамичных городских условиях.
В конечном итоге, интеграция моделирования траекторий и взаимодействия агентов открывает путь к созданию принципиально новых систем автономного вождения. Эти системы смогут не просто реагировать на текущую ситуацию, но и предвидеть возможные сценарии развития событий, основываясь на анализе намерений и поведения других участников дорожного движения. Благодаря этому, автомобили смогут более уверенно и безопасно ориентироваться даже в самых сложных городских условиях, таких как плотный трафик, пешеходные переходы и непредсказуемые действия других водителей, обеспечивая более плавное и надежное передвижение в любых ситуациях.
Представленная работа демонстрирует элегантность подхода к обнаружению аномалий в автономном вождении, фокусируясь на создании интерпретируемой системы. Авторы, подобно архитекторам, строят систему на основе непрерывных нормализующих потоков на спектральных многообразиях, что позволяет выявлять отклонения от нормы с высокой точностью. Тим Бернерс-Ли однажды сказал: «Интернет — это для всех». Эта идея перекликается с целью исследования — создать надежную и понятную систему безопасности, доступную для широкого применения в области автономного транспорта. Упор на спектральные многообразия и непрерывные потоки, безусловно, является проявлением стремления к ясности и простоте, что соответствует принципу: структура определяет поведение.
Что Дальше?
Представленный подход, хотя и демонстрирует перспективность в обнаружении аномалий для беспилотных систем, поднимает вопросы, требующие дальнейшей проработки. Построение «спектральных многообразий» — элегантное решение, но и иллюзия контроля, если не понимать, как контекст влияет на структуру данных. Модульность здесь ценна, но не как самоцель, а как инструмент для упрощения понимания системы в целом.
Если система держится на «костылях» из сложных преобразований, значит, мы переусложнили её. Следующим шагом представляется поиск более лаконичных представлений данных, способных улавливать суть аномалий без избыточной детализации. Необходимо исследовать, как можно интегрировать априорные знания о физических ограничениях и вероятных сценариях вождения непосредственно в процесс обучения, чтобы повысить устойчивость к шуму и непредсказуемым событиям.
Наконец, важно помнить, что безопасность автономных систем — это не только вопрос обнаружения аномалий, но и предвидения возможных ошибок. Следует обратить внимание на разработку систем, способных не просто сигнализировать об отклонении от нормы, но и предлагать альтернативные решения, обеспечивающие плавный и безопасный переход в штатный режим работы. Иначе, мы просто создаём сложный детектор проблем, а не систему, способную их предотвращать.
Оригинал статьи: https://arxiv.org/pdf/2602.17586.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- ПРОГНОЗ ДОЛЛАРА
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
2026-02-22 14:34