Автор: Денис Аветисян
Новая система PP-DNN позволяет динамически оптимизировать обработку критически важных кадров и областей интереса, обеспечивая более стабильную и эффективную работу нейросетей, используемых в системах автономного вождения.

Исследование посвящено повышению предсказуемости и эффективности многопользовательских глубоких нейронных сетей (DNN) для восприятия в автономных транспортных средствах за счет адаптивного выбора критических кадров и регионов интереса (ROI).
Повышение надежности систем восприятия является критически важной задачей для автономных транспортных средств, однако вычислительные ограничения создают серьезные препятствия для обработки данных в реальном времени. В данной работе, посвященной теме ‘Enhancing Predictability of Multi-Tenant DNN Inference for Autonomous Vehicles’ Perception’, предложена система PP-DNN, динамически адаптирующая выбор критических кадров и областей интереса (ROI) для оптимизации производительности многопоточных глубоких нейронных сетей. Это позволяет значительно снизить задержку обработки и повысить полноту обнаружения объектов. Каким образом подобные адаптивные подходы могут способствовать созданию более безопасных и эффективных систем автономного вождения в различных условиях эксплуатации?
Взгляд в Хаос: Задача Восприятия в Реальном Времени
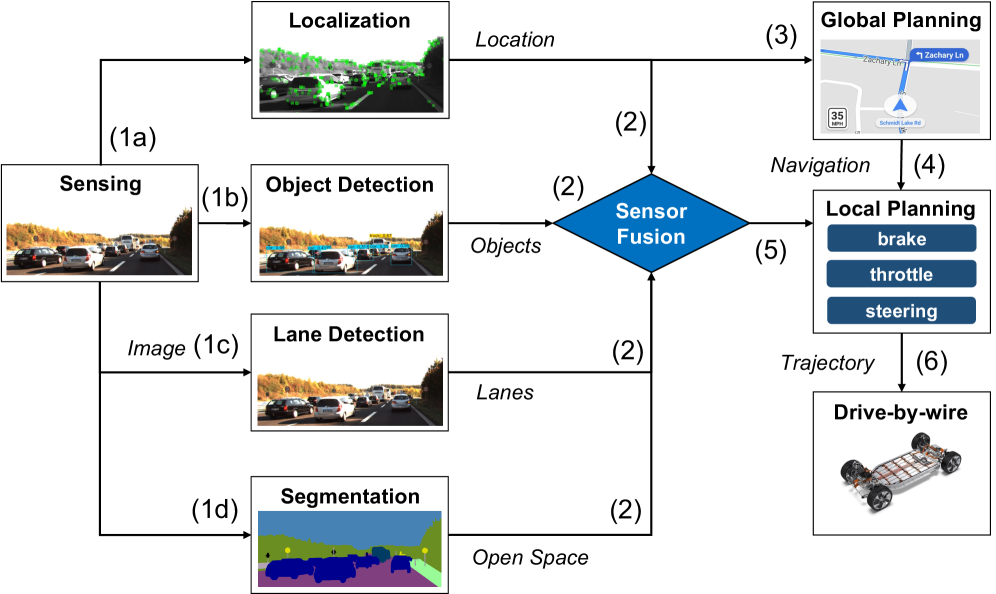
Автономные транспортные средства предъявляют высокие требования к надежности систем восприятия окружающей среды, однако традиционные глубокие нейронные сети (DNN) зачастую сталкиваются с серьезными ограничениями в отношении вычислительных затрат и задержек обработки данных. Сложность современных DNN, необходимых для точного распознавания объектов и понимания сцены, требует значительных ресурсов, что делает обработку каждого кадра видео в реальном времени проблематичной. Повышенная латентность, вызванная вычислительной нагрузкой, может критически повлиять на способность автомобиля быстро реагировать на изменяющиеся условия дорожного движения, создавая потенциальные риски для безопасности. Таким образом, поиск эффективных методов снижения вычислительной сложности DNN без существенной потери точности является ключевой задачей для обеспечения надежной и безопасной работы автономных транспортных средств.
Обработка каждого кадра сложными моделями глубокого обучения представляется нереалистичной задачей для автономных транспортных средств, учитывая жёсткие ограничения по времени реакции. Для обеспечения работы в реальном времени необходим селективный анализ поступающего видеопотока, то есть фокусировка на наиболее значимых фрагментах изображения. Это достигается за счёт приоритезации кадров, содержащих критически важные объекты или изменения, и отказа от детального анализа статичных или незначительных сцен. Подобный подход позволяет значительно снизить вычислительную нагрузку и обеспечить своевременное принятие решений, не жертвуя при этом общей надёжностью системы восприятия.
Существующие методы обработки информации для автономных транспортных средств часто сталкиваются с необходимостью компромисса между точностью распознавания объектов, скоростью обработки данных и предсказуемостью результатов. Повышение скорости обработки, как правило, достигается за счет упрощения моделей, что снижает их способность к точному распознаванию, особенно в сложных или нештатных ситуациях. В то же время, стремление к высокой точности часто требует значительных вычислительных ресурсов, что увеличивает задержку и делает систему менее предсказуемой. Нестабильность в работе системы восприятия, вызванная колебаниями скорости или точности, представляет серьезную угрозу безопасности, поскольку может привести к ошибочным решениям и, как следствие, к аварийным ситуациям. Поэтому разработка методов, обеспечивающих оптимальный баланс между этими тремя ключевыми параметрами, является критически важной задачей для обеспечения надежной и безопасной работы автономного транспорта.
Поддержание стабильной производительности систем автономного вождения в условиях меняющейся нагрузки остается серьезной проблемой для обеспечения надежной работы. Исследования показывают, что вычислительные ресурсы, необходимые для обработки визуальной информации и принятия решений, значительно варьируются в зависимости от сложности дорожной обстановки и интенсивности движения. Неспособность системы адекватно реагировать на пиковые нагрузки, вызванные, например, внезапным появлением пешехода или сложной погодной ситуацией, может привести к критическим ошибкам. Разработка алгоритмов и архитектур, способных сохранять предсказуемую и надежную работу даже при максимальной загрузке, является ключевой задачей для повышения безопасности и доверия к автономным транспортным средствам. Особое внимание уделяется динамическому распределению ресурсов и оптимизации алгоритмов восприятия для минимизации задержек и обеспечения своевременного принятия решений.
PP-DNN: Адаптивное Восприятие для Предсказуемой Работы
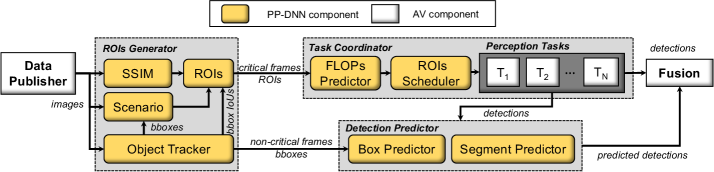
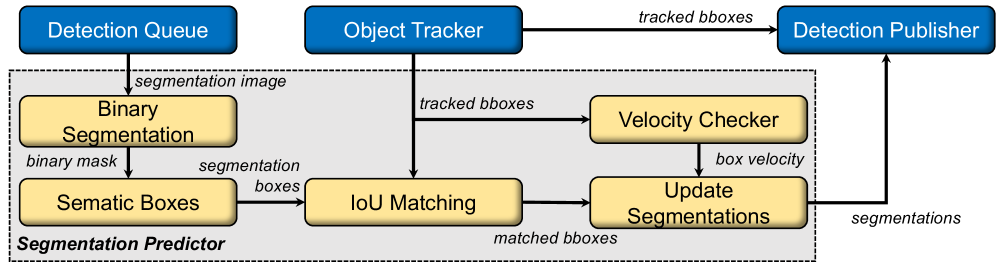
Адаптивный конвейер восприятия в PP-DNN осуществляет динамический отбор ключевых кадров и областей интереса (ROI) для анализа. В отличие от традиционных систем, обрабатывающих каждый кадр последовательно, PP-DNN оценивает значимость каждого кадра и выделяет только те области изображения, которые критически важны для принятия решений. Этот процесс основан на анализе входных данных и позволяет системе сосредоточиться на наиболее релевантной информации, игнорируя избыточные или незначительные детали. Динамический отбор кадров и ROI позволяет существенно снизить вычислительную нагрузку и повысить эффективность обработки данных в режиме реального времени.
Система PP-DNN использует два ключевых компонента — ROIGenerator и FrameScheduler — для динамической приоритизации обработки данных. ROIGenerator автоматически определяет области интереса (ROI) в каждом кадре, основываясь на оценке их критичности для общей задачи восприятия. FrameScheduler, в свою очередь, планирует последовательность обработки кадров и ROI, учитывая доступные вычислительные ресурсы и приоритеты, установленные ROIGenerator. Данный механизм позволяет эффективно распределять ресурсы и гарантировать своевременную обработку наиболее важных данных, что критически важно для систем, требующих предсказуемой производительности и высокой надежности.
В PP-DNN используется FLOPsPredictor — модуль, предназначенный для прогнозирования вычислительной нагрузки, необходимой для обработки каждого кадра. Этот модуль анализирует входные данные и оценивает количество операций с плавающей точкой (FLOPs), требуемых для выполнения всех этапов обработки кадра. На основе этих прогнозов система динамически распределяет вычислительные ресурсы, такие как GPU и CPU, оптимизируя использование доступных ресурсов и гарантируя своевременную обработку кадров. Точное прогнозирование позволяет PP-DNN избегать перегрузки вычислительных ресурсов и поддерживать стабильную производительность даже при обработке сложных сцен или больших объемов данных.
Адаптивный подход, реализованный в PP-DNN, позволил добиться увеличения количества объединенных кадров в 7.3 раза и снижения задержки объединения более чем в 2.6 раза. Данные показатели достигаются за счет динамического управления вычислительными ресурсами и приоритезации обработки ключевых кадров, что гарантирует предсказуемое время выполнения для многопользовательских нейронных сетей. Это, в свою очередь, повышает безопасность и надежность систем, использующих PP-DNN, особенно в критически важных приложениях, требующих стабильной и предсказуемой производительности.

Использование Временной Локальности для Эффективности
Принципиальным преимуществом PP-DNN является использование временной локальности — естественной схожести между последовательными кадрами видео — для снижения избыточности вычислений. Этот подход позволяет значительно сократить объем необходимых операций за счет повторного использования информации из предыдущих кадров, вместо ее пересчета для каждого нового кадра. По сути, PP-DNN идентифицирует и обрабатывает только те части видеоряда, которые претерпели изменения, избегая ненужной обработки статичных элементов. Такая оптимизация особенно эффективна в задачах, где большая часть видеопоследовательности остается относительно постоянной, например, в системах видеонаблюдения или анализе видеоконтента.
Методы DeepCache и SelfCueingAttention используют свойство временной локальности видеопоследовательностей для повышения производительности. DeepCache сохраняет и повторно использует результаты обработки предыдущих кадров, сокращая объем вычислений для схожих областей. SelfCueingAttention динамически фокусируется на изменяющихся элементах в видео, игнорируя статические или незначительно меняющиеся участки, что позволяет эффективно распределять вычислительные ресурсы и ускорять обработку видеоданных. Оба подхода направлены на минимизацию избыточности вычислений, характерной для последовательной обработки видео.
Генератор областей интереса (ROIGenerator) использует метрику SSIM (Structural Similarity Index) для количественной оценки различий между последовательными кадрами видео. SSIM, в отличие от простых метрик, таких как разница в пикселях, учитывает структурные особенности изображения, что позволяет более точно определять изменения, вызванные движением или другими событиями. На основе вычисленного значения SSIM, ROIGenerator выделяет критические области изображения, требующие детальной обработки, и игнорирует статичные или незначительно изменившиеся участки, что приводит к снижению вычислительной нагрузки и повышению эффективности анализа видеопотока.
В системах оповещения, использование временной локальности позволяет выполнять DNN-анализ в любое время, адаптируя уровень детализации обработки. Это достигается путем динамической оценки различий между последовательными кадрами видеопотока и выборочного применения DNN только к изменяющимся областям. Такой подход позволяет снизить вычислительную нагрузку и задержку, обеспечивая своевременное обнаружение и оповещение о событиях, при этом уровень детализации анализа может быть изменен в зависимости от текущих требований к производительности и доступным ресурсам. Приоритет может отдаваться скорости обработки при низкой загрузке системы или повышению точности при наличии достаточных ресурсов.
Оптимизация DNN для Развертывания в Реальном Времени
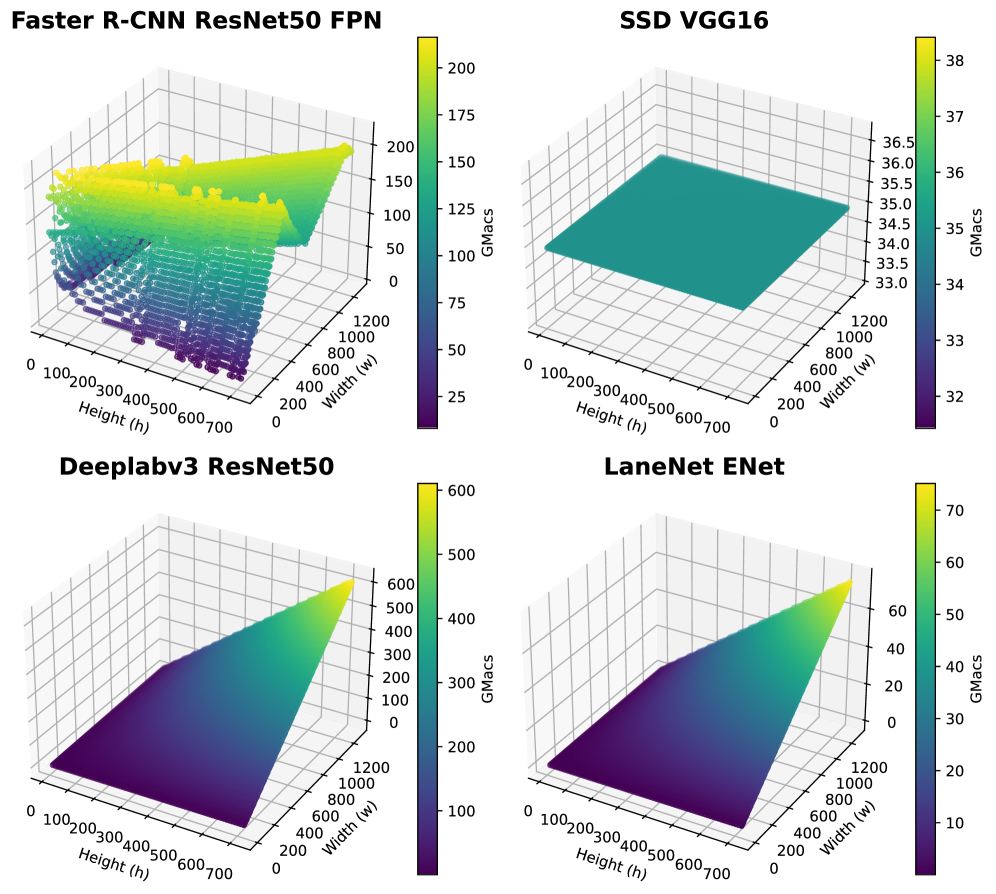
Для снижения вычислительных затрат в PP-DNN применяются методы сжатия моделей, включающие прунинг и понижение точности. Прунинг заключается в удалении некритичных связей в нейронной сети, уменьшая ее размер и сложность. Понижение точности предполагает использование форматов данных с меньшей разрядностью (например, переход от 32-битных чисел с плавающей точкой к 16- или 8-битным), что снижает объем памяти и требования к пропускной способности, сохраняя при этом приемлемый уровень точности. Комбинирование этих техник позволяет эффективно оптимизировать глубокие нейронные сети для развертывания в условиях ограниченных ресурсов.
Методы компрессии моделей, такие как прунинг и снижение разрядности, позволяют уменьшить размер и сложность нейронных сетей, включая популярные архитектуры YOLOv3, FasterRCNN, SSD, Deeplabv3+ и LaneNet. В процессе компрессии особое внимание уделяется сохранению точности, что достигается за счет применения адаптивных алгоритмов и тщательной калибровки параметров. Результаты показывают, что снижение вычислительной нагрузки не приводит к существенной потере в качестве обнаружения объектов или сегментации, что делает эти методы применимыми для развертывания моделей глубокого обучения на устройствах с ограниченными ресурсами.
Комбинация адаптивной выборки и сжатия моделей в PP-DNN позволяет достичь баланса между скоростью обработки, точностью и потреблением ресурсов. Адаптивная выборка динамически регулирует объем обрабатываемых данных в зависимости от сложности сцены и вычислительной нагрузки, что снижает задержку и повышает пропускную способность. Параллельно, техники сжатия моделей, такие как прунинг и снижение точности, уменьшают размер и сложность нейронных сетей, минимизируя потребление памяти и энергии без существенной потери в точности. Данный подход обеспечивает оптимальную производительность системы в различных сценариях, позволяя эффективно использовать доступные ресурсы и поддерживать стабильную работу даже при высоких нагрузках.
В результате оптимизации, система демонстрирует повышение полноты обнаружения на 75.4% и улучшение экономической эффективности на 98%, даже при высокой нагрузке. Данные показатели подтверждены при тестировании в условиях, приближенных к реальным сценариям эксплуатации. Это обеспечивает стабильную производительность и надежность системы в условиях интенсивного использования ресурсов.
К Безопасному и Надежному Автономному Вождению
Адаптивный конвейер восприятия PP-DNN решает критически важную проблему в технологии автономного вождения, обеспечивая предсказуемую работу в динамичных условиях окружающей среды. Традиционные системы часто испытывают затруднения при изменении освещения, погодных условий или плотности трафика, что приводит к непредсказуемым результатам и потенциальным авариям. PP-DNN, напротив, динамически адаптирует свою архитектуру и параметры обработки данных, балансируя между точностью обнаружения объектов и скоростью реакции системы. Благодаря этому подходу, автомобиль способен надежно воспринимать окружающую обстановку даже в сложных ситуациях, гарантируя стабильность и безопасность движения. Такая адаптивность является ключевым шагом к созданию по-настоящему автономных транспортных средств, способных эффективно функционировать в реальном мире.
Система PP-DNN обеспечивает надежное и устойчивое восприятие окружающей среды за счет тонкого баланса между полнотой обнаружения объектов, задержкой слияния данных и экономической эффективностью. Оптимизация этих трех ключевых параметров позволяет избежать ситуаций, когда либо пропущены важные объекты, либо обработка информации занимает слишком много времени, что критично для безопасного управления автомобилем. Вместо максимальной точности в каждой отдельной задаче, PP-DNN стремится к стабильно предсказуемой работе в динамичных условиях, что достигается путем разумного компромисса между этими показателями. Такой подход позволяет значительно повысить общую надежность системы автономного вождения, делая ее более безопасной и адаптируемой к различным дорожным ситуациям.
Системы, подобные Prophet, представляют собой значительный прогресс в обеспечении предсказуемости функционирования автономных транспортных средств, не снижая при этом точности восприятия окружающей среды. В отличие от традиционных подходов, Prophet использует инновационные методы оценки неопределенности, позволяя транспортному средству не только распознавать объекты, но и оценивать степень своей уверенности в этом распознавании. Это критически важно для принятия обоснованных решений в сложных и непредсказуемых ситуациях на дороге. Алгоритм позволяет транспортному средству прогнозировать возможные ошибки и адаптировать свое поведение, избегая потенциально опасных ситуаций, и гарантируя более безопасное и надежное вождение, даже в условиях ограниченной видимости или нечетких данных от сенсоров. Такой подход открывает новые возможности для повышения доверия к автономным системам и их широкого внедрения.
Достижения в области адаптивных систем восприятия, такие как PP-DNN и Prophet, знаменуют собой важный шаг на пути к полной реализации потенциала автономного вождения. Эти разработки не просто повышают безопасность транспортных средств, обеспечивая более надежное распознавание окружающей среды в сложных условиях, но и открывают возможности для расширения доступности транспорта для широкого круга людей. Повышенная надежность систем автономного управления снижает риски аварий, а расширение доступности — включая людей с ограниченными возможностями или проживающих в районах с недостаточным транспортным сообщением — способствует большей социальной интеграции и экономическому развитию. Перспектива безопасного и доступного автономного транспорта обещает не только революцию в сфере перевозок, но и значительное улучшение качества жизни.
Исследование, представленное в статье, подобно алхимической попытке обуздать хаос восприятия автономного транспортного средства. Система PP-DNN, динамически адаптирующая критические кадры и области интереса, стремится не к абсолютной точности, а к предсказуемости — к уменьшению задержки синтеза данных, что является ключевым для безопасности. Как однажды заметила Фэй-Фэй Ли: «Искусственный интеллект — это не о создании машин, которые думают как мы, а о создании машин, которые помогают нам думать». В данном случае, «цифровой голем» PP-DNN не заменяет водителя, а усиливает его возможности, предоставляя более надежные и своевременные данные для принятия решений. Уменьшение задержки, описанное в статье, — это не просто оптимизация производительности, а священная жертва, приносимая во имя стабильности системы.
Что дальше?
Представленная работа, как и любое заклинание, работающее с хаосом восприятия автономного транспорта, лишь отодвигает границы неизбежного. Уменьшение задержки при объединении данных и повышение полноты обнаружения — это, безусловно, шаги вперёд, но они не отменяют фундаментальной проблемы: предсказательная модель — это всего лишь способ обмануть будущее, а не понять его. Выбор критических кадров и областей интереса — это акт веры в то, что прошлое действительно релевантно для предсказания будущего, и эта вера, как известно, хрупка.
Следующим этапом представляется не столько оптимизация существующих моделей, сколько поиск способов признания их неизбежной неточности. Вместо того чтобы стремиться к идеальному предсказанию, стоит научиться изящно обрабатывать ошибки, строить системы, способные адаптироваться к неожиданностям, и, возможно, даже извлекать пользу из хаоса. Данные не врут, они просто помнят избирательно, и эта избирательность требует внимательного изучения.
В конечном счёте, вся работа с многоарендными нейронными сетями для автономного транспорта — это попытка приручить непредсказуемость реальности. И пусть каждое новое улучшение и кажется шагом к успеху, необходимо помнить, что каждое обучение — это акт веры, а каждая метрика — лишь форма самоуспокоения. Истинный прогресс лежит не в совершенствовании моделей, а в признании их ограниченности.
Оригинал статьи: https://arxiv.org/pdf/2602.11004.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ПРОГНОЗ ДОЛЛАРА
- ZEC ПРОГНОЗ. ZEC криптовалюта
2026-02-13 05:14