Автор: Денис Аветисян
Новое исследование посвящено оценке и повышению устойчивости систем обнаружения объектов в беспилотных автомобилях в сложных погодных условиях.
Оценка производительности и определение границ безопасной эксплуатации систем обнаружения объектов в условиях неблагоприятной погоды с использованием методов машинного обучения и расширения данных.
Несмотря на значительный прогресс в области автономного вождения, обеспечение надежной работы систем обнаружения объектов в неблагоприятных погодных условиях остается критической задачей. В работе, посвященной теме ‘Robustness of Object Detection of Autonomous Vehicles in Adverse Weather Conditions’, предложен метод оценки устойчивости моделей машинного обучения к различным погодным явлениям, таким как туман, дождь и снег. Данный подход позволяет определить порог интенсивности неблагоприятных условий, при котором происходит снижение производительности, и измерить устойчивость моделей на основе коэффициентов первого отказа. Эксперименты с моделями YOLOv5s, YOLOv11s, Faster R-CNN и Detectron2 показали, что обучение с использованием синтетических данных, имитирующих неблагоприятные условия, может повысить устойчивость, однако существует риск переобучения и ухудшения производительности. Какие дальнейшие исследования необходимы для разработки более надежных и адаптивных систем автономного вождения в сложных погодных условиях?
Критическая Необходимость Надежного Обнаружения Объектов
Автономные транспортные средства в значительной степени полагаются на системы обнаружения объектов для обеспечения безопасной эксплуатации, однако существующие технологии демонстрируют уязвимость к внешним факторам окружающей среды. Точность идентификации пешеходов, других автомобилей и дорожных знаков критически важна для принятия решений в режиме реального времени, и даже незначительные ошибки могут привести к серьезным последствиям. В частности, алгоритмы компьютерного зрения, лежащие в основе этих систем, часто испытывают трудности при обработке изображений, полученных в сложных погодных условиях или при плохой освещенности. Неспособность надежно распознавать объекты в таких ситуациях ограничивает возможности автономных машин и требует разработки более устойчивых и адаптивных технологий, способных функционировать в любых условиях эксплуатации.
Работа систем обнаружения объектов, критически важных для функционирования автономных транспортных средств, подвержена существенному снижению эффективности в неблагоприятных погодных условиях. Дождь, туман и снег создают помехи для работы сенсоров, таких как камеры и лидары, приводя к ошибочной идентификации объектов или их полному игнорированию. Это может привести к серьезным последствиям, включая столкновения и другие аварийные ситуации, поскольку автомобиль не способен адекватно реагировать на окружающую среду. Снижение видимости и искажение данных, вызванные осадками, требуют разработки новых алгоритмов и сенсорных систем, способных эффективно функционировать даже в сложных метеорологических условиях, что является ключевым фактором для обеспечения безопасности автономного транспорта.
Современные системы обнаружения объектов, критически важные для функционирования автономных транспортных средств и других приложений, демонстрируют существенные ограничения в реальных условиях эксплуатации. Исследования показывают, что зависимость от идеальных параметров освещения и видимости приводит к заметному снижению точности и надежности в сложных погодных условиях, таких как дождь, туман или снегопад. В связи с этим, необходим принципиально новый подход к разработке этих систем, ориентированный на обеспечение их устойчивости и безотказности в любых ситуациях. Акцент должен быть сделан на создании алгоритмов, способных эффективно компенсировать негативное влияние внешних факторов и поддерживать высокую степень достоверности обнаружения объектов, гарантируя тем самым безопасность и надежность работы в любых условиях окружающей среды.
Усиление Данных для Повышения Надежности Модели
Генерация синтетических данных в сочетании с техниками аугментации данных представляет собой перспективный подход к повышению устойчивости моделей машинного обучения. Синтетические данные создаются программно, позволяя дополнить существующий набор данных различными сценариями и вариациями, которые могут быть недостаточно представлены в реальных данных. Аугментация данных, в свою очередь, применяет к существующим данным преобразования, такие как повороты, масштабирование или добавление шума, для увеличения разнообразия обучающей выборки. Комбинирование этих методов позволяет модели обучаться на более широком спектре входных данных, что повышает ее способность к обобщению и снижает чувствительность к шуму и отклонениям в реальных данных, тем самым повышая ее надежность и точность в различных условиях.
Искусственное расширение обучающей выборки посредством создания вариаций, имитирующих неблагоприятные погодные условия, позволяет повысить обобщающую способность моделей машинного обучения и поддерживать высокую точность. Создание синтетических данных, представляющих различные сценарии дождя, снега, тумана или изменения освещенности, позволяет модели научиться распознавать объекты и ситуации в условиях, которые недостаточно представлены в исходной обучающей выборке. Это достигается путем применения различных техник, таких как добавление шума, изменение яркости и контрастности, а также геометрические преобразования, что эффективно увеличивает разнообразие данных и снижает зависимость модели от конкретных условий съемки. В результате модель становится более устойчивой к изменениям окружающей среды и демонстрирует более надежные результаты в реальных условиях эксплуатации.
Ограниченность реальных данных, полученных в сложных условиях эксплуатации, представляет собой значительную проблему для разработки надежных систем автономного вождения. Недостаток размеченных данных, отражающих неблагоприятные погодные явления, плохое освещение или другие факторы, снижает способность моделей к обобщению и ухудшает их производительность в реальных сценариях. Это особенно актуально для редких, но критически важных ситуаций, которые сложно воспроизвести в достаточных количествах при сборе данных в реальном мире. В результате, модели могут демонстрировать значительное снижение точности или даже отказывать в сложных условиях, что создает риски для безопасности.
Количественная Оценка Надежности: Новая Метрика
Традиционные метрики, такие как Mean Average Precision (mAP), оценивают производительность моделей машинного зрения в идеальных условиях, но не отражают снижение точности при воздействии реальных помех. mAP измеряет среднюю точность обнаружения объектов, предполагая, что входные данные всегда соответствуют ожидаемому формату и качеству. Однако, в реальных сценариях, изображения могут быть подвержены шумам, изменениям освещения, погодным условиям или другим искажениям, которые существенно влияют на результаты. Поэтому, высокая оценка mAP в лабораторных условиях не гарантирует надежной работы модели в условиях, приближенных к реальным, что ограничивает ее применимость для критически важных задач, где важна устойчивость к неблагоприятным факторам.
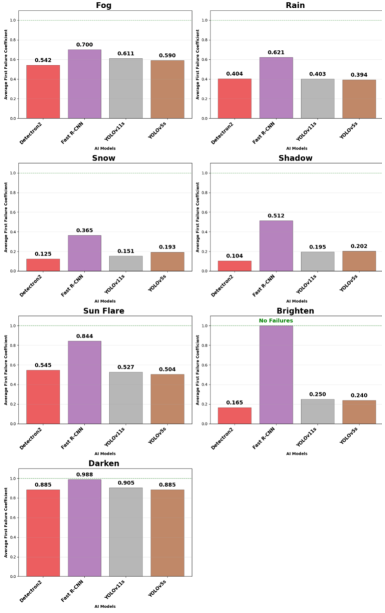
Коэффициент первой неудачи (First Failure Coefficient) — это новая метрика, предназначенная для количественной оценки устойчивости (robustness) модели компьютерного зрения в реальных условиях эксплуатации. В отличие от традиционных метрик, оценивающих производительность в идеальных условиях, данный коэффициент измеряет степень деградации производительности модели при увеличении уровня внешних помех и стрессовых факторов, таких как изменения освещения, погодные условия или различные типы шумов. Фактически, метрика отражает процентное снижение производительности до момента, когда модель перестает выполнять задачу на приемлемом уровне. Чем выше коэффициент, тем более устойчива модель к внешним воздействиям и тем надежнее ее работа в сложных условиях.
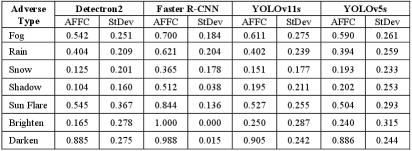
При проведении сравнительного анализа моделей YOLOv5 и FasterRCNN с использованием набора тестов Corruption Benchmarks и метрики First Failure Coefficient, модель FasterRCNN продемонстрировала более высокую устойчивость к ухудшению условий работы. Среднее значение First Failure Coefficient (AFFC) для FasterRCNN составило 71.9% при оценке производительности в различных погодных условиях. Это указывает на то, что FasterRCNN сохраняет работоспособность при более значительном уровне деградации входных данных по сравнению с другими протестированными моделями, что делает её более надежной в реальных сценариях эксплуатации.
Совершенствование Архитектуры Модели для Всепогодной Производительности
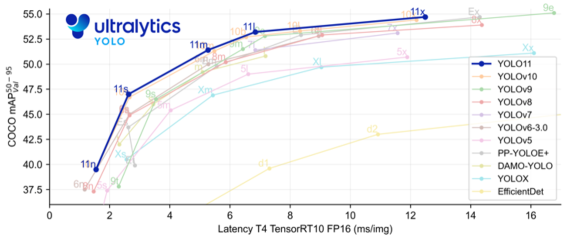
Команда Oxford Brookes Racing Autonomous (OBRA) разработала и внедрила YOLOv11 — улучшенную версию алгоритма обнаружения объектов YOLOv5. YOLOv11 ориентирована на повышение устойчивости к различным факторам, ухудшающим качество работы систем автономного вождения. Модификации алгоритма направлены на улучшение способности к точному определению объектов в сложных условиях, таких как плохая освещенность, неблагоприятные погодные условия и помехи, что является критически важным для обеспечения надежной работы автономных транспортных средств в реальных сценариях.
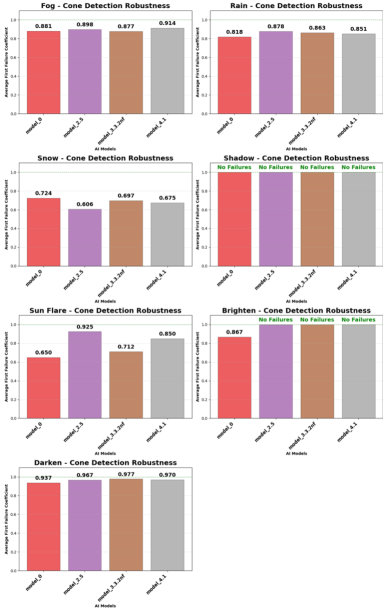
Испытания показали, что YOLOv11 демонстрирует повышенную устойчивость в смоделированных неблагоприятных условиях, что оценивается с помощью коэффициента первого отказа (First Failure Coefficient, AFFC). Этот показатель определяет вероятность успешного обнаружения объектов до возникновения первой ошибки в работе модели. Повышение AFFC указывает на улучшенную способность модели сохранять функциональность при наличии помех и ухудшении условий видимости, что критически важно для обеспечения надежной работы автономных систем в реальных условиях. В ходе тестов, проведенных командой Oxford Brookes Racing Autonomous, модель YOLOv11 показала значительное улучшение AFFC по сравнению с базовой моделью, подтверждая ее повышенную устойчивость к различным типам помех.
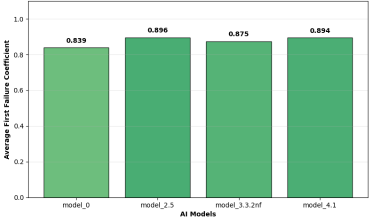
Модель M2.5 продемонстрировала коэффициент первого отказа (AFFC) в 89.6%, что на 6% выше, чем у базовой модели M0. В частности, при моделировании помех от солнечных вспышек, AFFC составил 92.5%, а при моделировании снегопада — 72.4%. Эти результаты указывают на значительное повышение устойчивости модели M2.5 к неблагоприятным условиям, влияющим на работу системы автономного вождения.
К Истинно Автономным и Надежным Системам
Разработка надежных систем обнаружения объектов, способных функционировать в сложных погодных условиях, требует приоритезации оперативной устойчивости и применения передовых метрик оценки. Традиционные показатели часто не отражают реальную способность модели сохранять работоспособность в условиях ухудшения видимости или наличия помех. В связи с этим, все больше внимания уделяется коэффициенту первого отказа — метрике, определяющей время до возникновения первой критической ошибки в процессе работы. Повышение устойчивости достигается за счет использования специализированных наборов данных, включающих изображения, полученные в неблагоприятных погодных условиях, а также применения алгоритмов, устойчивых к шумам и искажениям. Такой подход позволяет создавать системы, способные безопасно и эффективно функционировать в реальных условиях эксплуатации, что особенно важно для автономного транспорта и других критически важных приложений.
Разработка надежных систем обнаружения объектов имеет решающее значение для безопасного и повсеместного внедрения автономного транспорта в различных и сложных условиях эксплуатации. Способность беспилотных автомобилей безопасно функционировать в условиях дождя, снега, тумана или при плохом освещении напрямую зависит от устойчивости алгоритмов компьютерного зрения к этим неблагоприятным факторам. Достижения в этой области не только повышают безопасность дорожного движения, но и открывают возможности для широкого применения автономных технологий в логистике, сельском хозяйстве и других отраслях, где требуется надежная работа в сложных внешних условиях. Успешное решение проблем, связанных с эксплуатационной устойчивостью, является ключевым шагом на пути к созданию действительно автономных и надежных систем, способных функционировать без вмешательства человека в самых разнообразных сценариях.
Дальнейшие исследования направлены на решение проблемы катастрофического забывания — явления, когда нейронные сети теряют способность распознавать ранее изученные объекты при обучении новым данным. Ученые рассматривают перспективные стратегии увеличения данных, позволяющие создавать более разнообразные и реалистичные наборы для обучения. Эти методы включают в себя не только традиционные преобразования изображений, но и генерацию синтетических данных, имитирующих сложные погодные условия и различные сценарии дорожного движения. Цель этих усилий — повышение устойчивости и надежности систем машинного зрения, что критически важно для безопасной и эффективной работы автономных транспортных средств в реальных условиях эксплуатации.
Исследование, посвященное устойчивости систем обнаружения объектов в неблагоприятных погодных условиях, подчеркивает важность глубокого понимания границ применимости моделей машинного обучения. Авторы предлагают методику оценки производительности в сложных условиях, что позволяет определить безопасные пределы эксплуатации автономных транспортных средств. В этом контексте особенно примечательны слова Эндрю Ына: «Самый важный момент в машинном обучении — это данные». Действительно, надежность системы обнаружения объектов напрямую зависит от качества и разнообразия данных, используемых для её обучения и тестирования, особенно при оценке устойчивости к различным погодным явлениям. Внимательное отношение к данным — ключ к созданию гармоничной и эффективной системы.
Куда Далее?
Представленная работа, стремясь к оценке устойчивости систем обнаружения объектов в сложных погодных условиях, неизбежно обнажает границы применимости существующих подходов. Улучшение алгоритмов обнаружения — лишь часть решения. Более глубокое понимание того, как именно неблагоприятные условия искажают данные, и как эти искажения влияют на принятие решений, представляется задачей более фундаментальной. Изящное решение не будет заключаться в грубой силе, а в тонком понимании природы шума и умении его фильтровать, не теряя при этом важной информации.
Очевидно, что акцент на увеличении объемов размеченных данных, пусть и полезный, не решает проблему в корне. Синтетические данные, полученные посредством аугментации, всегда будут нести в себе отпечаток предвзятости создателя. Поэтому, исследования в области самообучения и неконтролируемого обучения представляются особенно перспективными. Возможно, именно способность системы к самостоятельному анализу и адаптации к меняющимся условиям станет ключом к истинной надежности.
В конечном счете, оценка надежности — это не просто измерение точности в различных условиях. Это признание ограниченности наших знаний и стремление к созданию систем, способных предвидеть и смягчать последствия неизбежных ошибок. Истинная элегантность — в осознании хрупкости любого решения и постоянном поиске способов его улучшения.
Оригинал статьи: https://arxiv.org/pdf/2602.12902.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- ПРОГНОЗ ДОЛЛАРА
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
2026-02-16 20:44