Автор: Денис Аветисян
Исследователи обнаружили, что неавторегрессивные диффузионные модели способны эффективнее решать задачи планирования, используя структурную асимметрию и обратную логику декодирования.
В статье показано, что дискретные диффузионные модели превосходят авторегрессивные модели по эффективности при решении задач планирования на основе графов.
Несмотря на широкое применение авторегрессионных (AR) моделей, таких как Transformer, в задачах планирования с предварительным просмотром, их эффективность в решении задач, требующих многошагового прогнозирования, вызывает вопросы. В данной работе, посвященной исследованию ‘Discrete Diffusion Models Exploit Asymmetry to Solve Lookahead Planning Tasks’, анализируются механизмы, возникающие при обучении AR и неавторегрессионных (NAR) моделей, в частности, дискретных диффузионных моделей (dLLM), в задачах планирования. Показано, что NAR модели используют асимметрию в структуре задач планирования, эффективно декодируя информацию в обратном направлении, в то время как AR модели нуждаются в сложных механизмах обхода графа. Каким образом можно использовать эти различия для создания более эффективных и масштабируемых систем планирования и принятия решений?
Преодолевая Узкие Места Планирования: Ограничения Авторегрессии
Современные большие языковые модели, функционирующие на основе авторегрессивного подхода, демонстрируют впечатляющую способность предсказывать следующий элемент последовательности, однако сталкиваются с серьезными трудностями при решении задач, требующих многоэтапного планирования. Вместо разработки стратегии для достижения конкретной цели, эти модели, по сути, лишь продолжают заданную последовательность, опираясь на статистические закономерности в данных. Это означает, что при необходимости принятия ряда взаимосвязанных решений, требующих оценки различных вариантов развития событий, их производительность существенно снижается. Вместо того, чтобы рассматривать несколько возможных будущих состояний и выбирать оптимальный путь, модель ограничивается предсказанием наиболее вероятного следующего шага, что препятствует формированию долгосрочной стратегии и эффективному решению сложных, многокомпонентных задач.
Стандартная задача обучения больших языковых моделей — предсказание следующего токена в последовательности — делает акцент на беглости и грамматической правильности текста, а не на стратегическом предвидении и рассуждениях. В процессе обучения модель оптимизируется для правдоподобного продолжения заданной фразы, что приводит к впечатляющей способности генерировать связный текст, но ограничивает её способность к планированию и решению задач, требующих многошагового мышления. Вместо того, чтобы оценивать долгосрочные последствия своих действий или исследовать различные варианты развития событий, модель сосредотачивается на краткосрочном предсказании следующего слова, что препятствует формированию истинных рассудительных способностей и ограничивает её эффективность в задачах, требующих глубокого анализа и стратегического планирования.
Последовательная обработка информации, характерная для авторегрессионных моделей, создает существенное ограничение при решении задач, требующих оценки множества возможных сценариев развития событий. Вместо одновременного анализа различных путей, модель вынуждена последовательно предсказывать следующий шаг, что значительно сужает горизонт планирования и затрудняет долгосрочное прогнозирование. Для достижения сопоставимой производительности в сложных задачах, авторегрессионные модели требуют значительно больше обучающих данных, чем подходы, способные к более широкому и параллельному исследованию пространства возможностей. Это демонстрирует явное ограничение в эффективности использования данных — ключевой показатель, определяющий практическую применимость и масштабируемость искусственного интеллекта.
Параллельные Пути Планирования: Неавторегрессивные Модели
Неавторегрессивные модели представляют собой альтернативный подход к генерации последовательностей, отличающийся возможностью параллельного формирования токенов. В отличие от авторегрессивных моделей, которые генерируют каждый токен последовательно, опираясь на предыдущие, NAR-модели способны генерировать все токены одновременно. Это обеспечивает значительное ускорение процесса генерации, особенно при использовании современного оборудования, такого как графические процессоры. Параллельная обработка также позволяет более эффективно исследовать пространство возможных решений, что особенно важно для задач планирования и поиска оптимальных стратегий. Возможность одновременной оценки различных вариантов позволяет снизить вычислительные затраты и ускорить сходимость модели к оптимальному решению.
Ключевым преимуществом неавторегрессивных моделей является возможность использования двунаправленного контекста при принятии решений. В отличие от авторегрессивных моделей, которые обрабатывают информацию последовательно, неавторегрессивные модели могут одновременно учитывать как предшествующую, так и последующую информацию. Это достигается за счет отказа от последовательной генерации токенов и обработки всего входного сигнала параллельно. Использование двунаправленного контекста позволяет модели более эффективно оценивать взаимосвязи между элементами входных данных и, как следствие, принимать более обоснованные решения, особенно в задачах, требующих понимания глобального контекста.
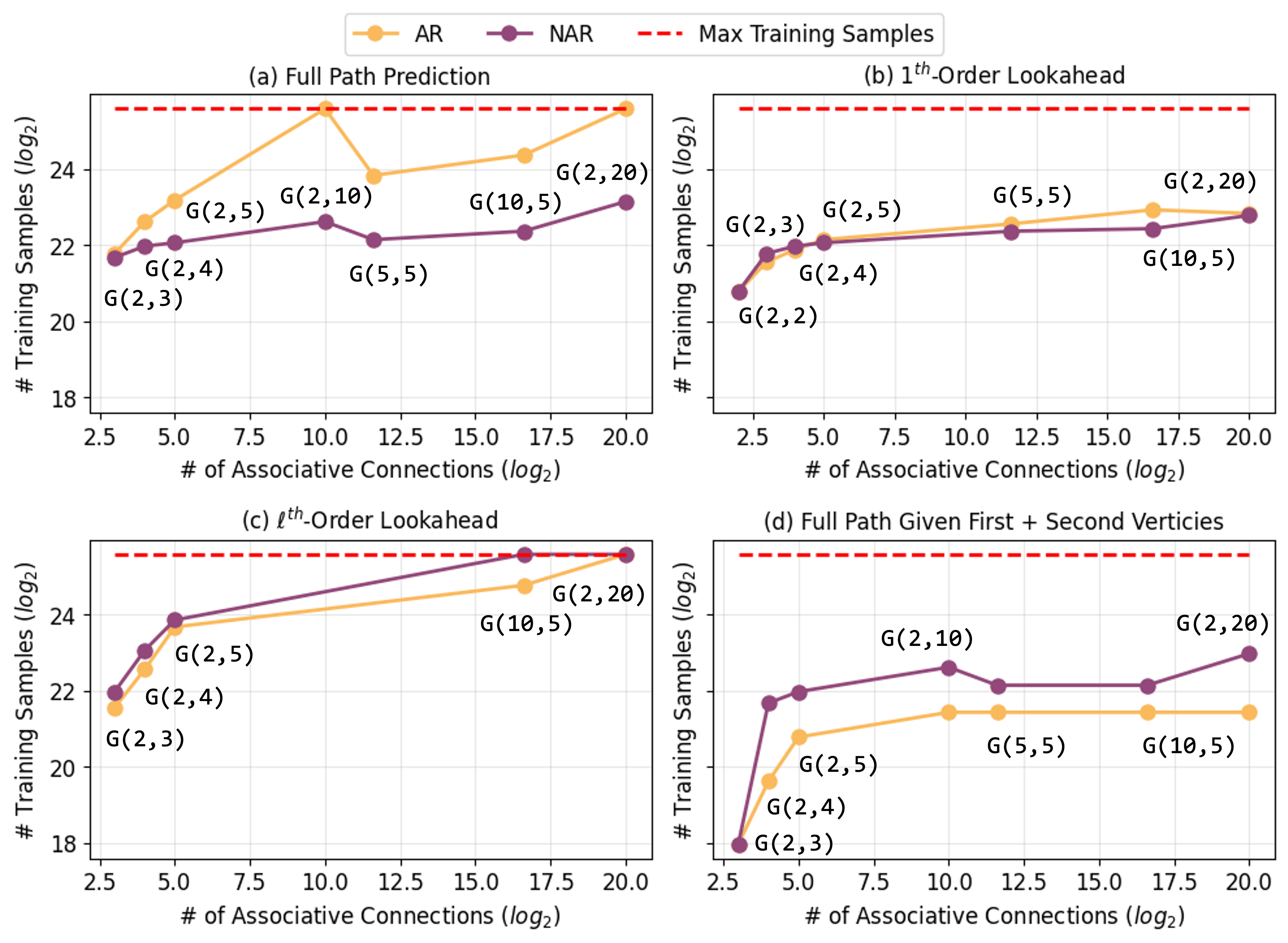
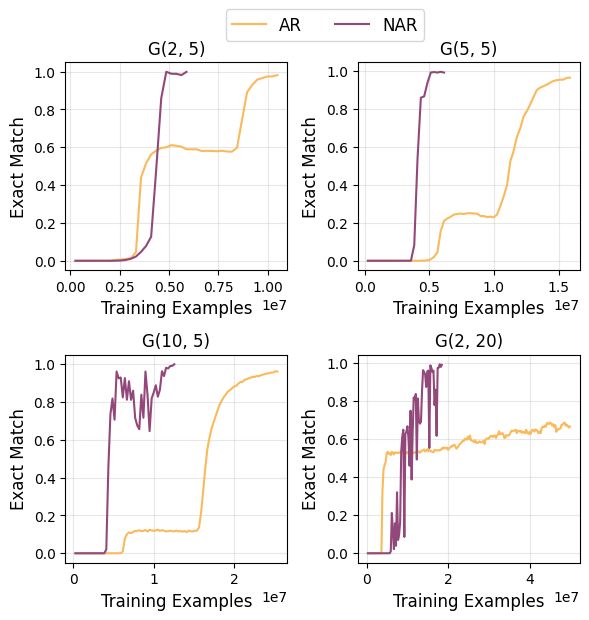
Параллельная обработка, обеспечиваемая неавторегрессивными моделями (NAR), критически важна для задач планирования, где одновременная оценка множества потенциальных траекторий значительно повышает эффективность. Наши результаты демонстрируют, что NAR модели сходятся экспоненциально быстрее, требуя значительно меньше обучающих примеров по сравнению с авторегрессивными моделями (AR). Это означает, что для достижения сопоставимой производительности NAR моделям требуется существенно меньше данных, что делает их более экономичными и масштабируемыми для сложных задач планирования, где объем данных может быть ограничен.
Планирование как Поиск Пути: Обратное Декодирование и Обход Графов
В рамках подхода к планированию, задача формулируется как задача обхода графа. Каждое возможное состояние системы представляется узлом графа, а каждое действие, приводящее к изменению состояния, — ребром, соединяющим соответствующие узлы. Такое представление позволяет применять стандартные алгоритмы поиска по графу, такие как алгоритм Дейкстры, A* или поиск в ширину, для нахождения оптимальной последовательности действий, ведущей от начального состояния к целевому. Использование графового представления обеспечивает структурированный подход к планированию и позволяет эффективно исследовать пространство возможных решений, особенно в сложных задачах с большим количеством состояний и действий.
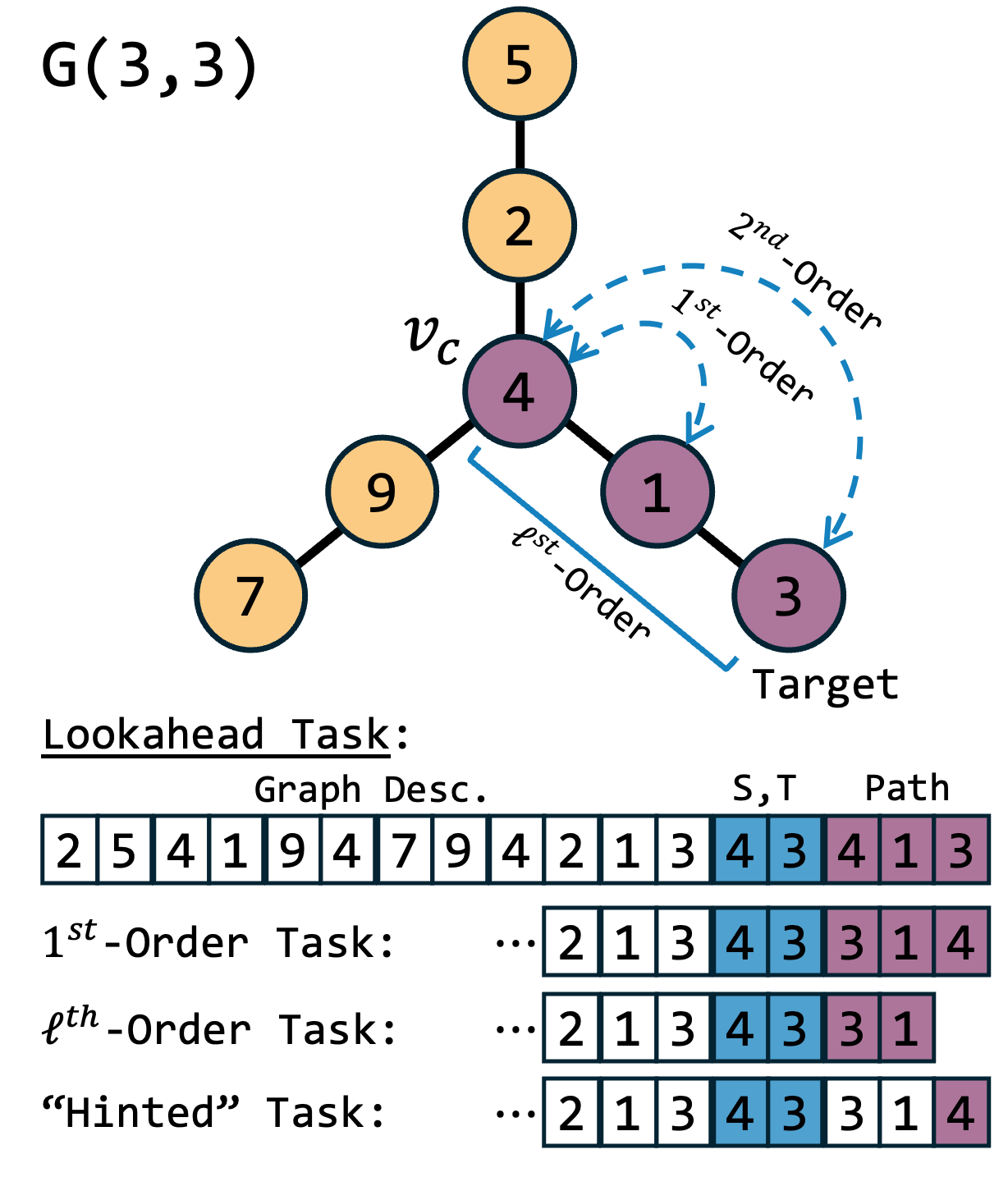
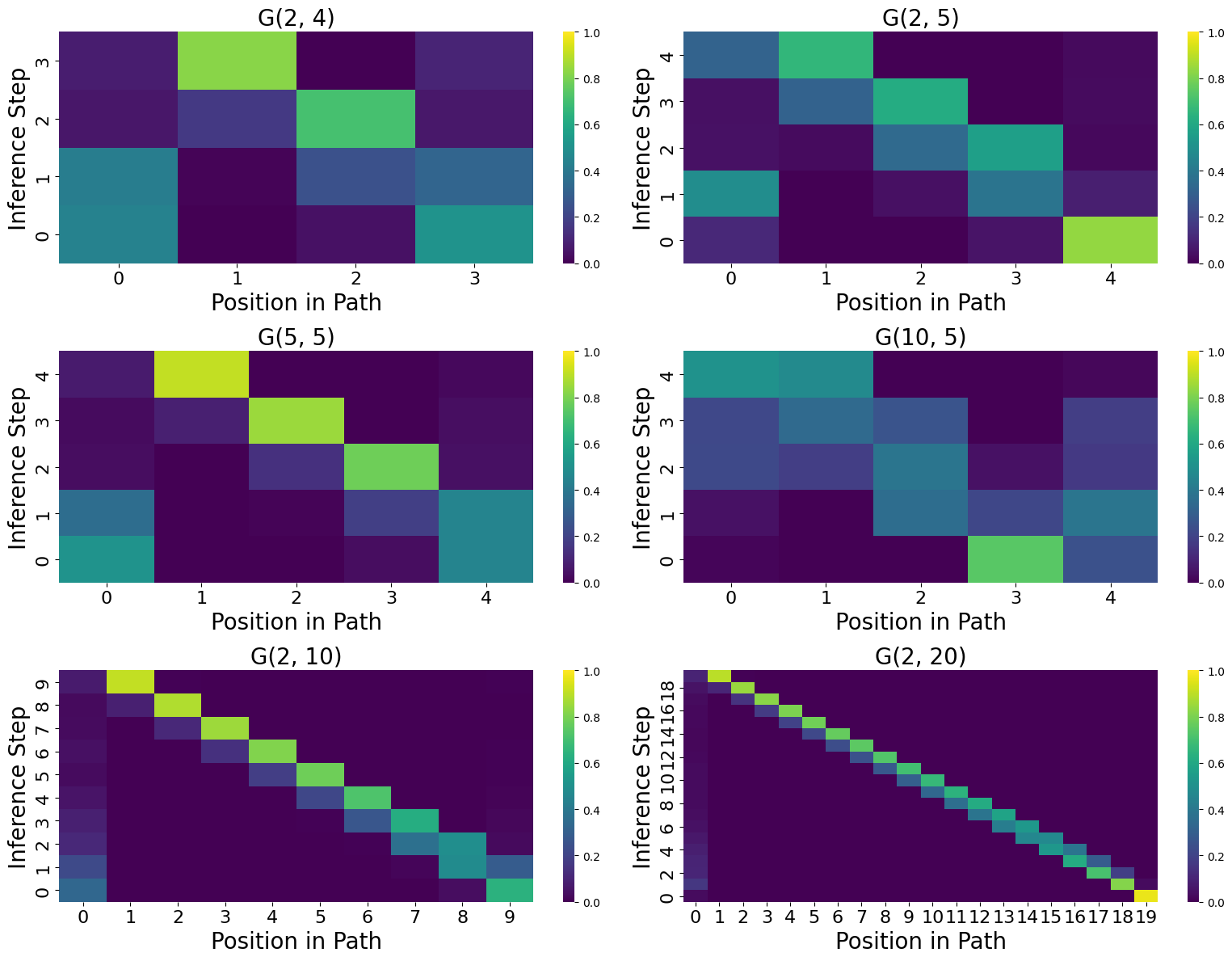
Стратегия обратного декодирования, используемая в дискретных диффузионных моделях, позволяет построить план действий, начиная с целевого состояния и прослеживая путь к исходному. Модель итеративно определяет предшествующее состояние, наиболее вероятное для достижения текущего, основываясь на P(s_{t-1}|s_t), где s_t — текущее состояние, а s_{t-1} — предшествующее. Этот процесс повторяется до тех пор, пока не будет достигнуто начальное состояние, формируя последовательность действий, необходимых для перехода от старта к цели. Фактически, обратное декодирование позволяет модели «проиграть» последовательность шагов в обратном порядке, что эквивалентно планированию пути.
Стратегия обратного декодирования в дискретных диффузионных моделях опирается на переходы первого порядка между соседними узлами графа состояний. Это означает, что модель определяет следующее состояние, основываясь только на текущем состоянии и выбранном действии, без учета более отдаленных состояний или сложных зависимостей. Использование переходов первого порядка существенно упрощает процесс поиска оптимального пути, позволяя модели эффективно исследовать пространство состояний и идентифицировать последовательность действий, ведущую к целевому состоянию. Такой подход обеспечивает вычислительную эффективность, особенно в задачах с высокой размерностью пространства состояний, поскольку снижает сложность поиска и позволяет сосредоточиться на локальных переходах.
Проверка на “Звездном Пути”: Превосходство NAR в Стратегическом Мышлении
Задача “Звёздный Путь” (Star-Path Task) представляет собой контролируемую среду для оценки способностей к планированию. Её ключевой особенностью является структура “звёздного графа” (Star-Graph), в которой начальная точка соединена со множеством конечных точек, а агент должен определить оптимальный путь для достижения конкретной цели. Контролируемость среды обеспечивается четко определенными состояниями, действиями и наградами, что позволяет точно измерять эффективность различных алгоритмов планирования и сравнивать их производительность. Использование данной задачи позволяет изолировать и оценить способность модели к построению последовательности действий, необходимых для достижения поставленной цели, исключая влияние внешних факторов и случайности.
В ходе тестирования на задаче `Star-Path`, использующей графовую структуру `Star-Graph`, модели дискретной диффузии, обученные стратегии обратного декодирования, продемонстрировали превосходство над авторегрессионными моделями. Обе категории моделей — как авторегрессионные (AR), так и неавторегрессионные (NAR) — способны достичь 100% точности, однако модели NAR требуют значительно меньшего объема обучающих данных для достижения сопоставимых результатов. Это указывает на более эффективное использование информации и повышенную способность к обобщению у моделей неавторегрессионного типа в рамках данной задачи планирования.
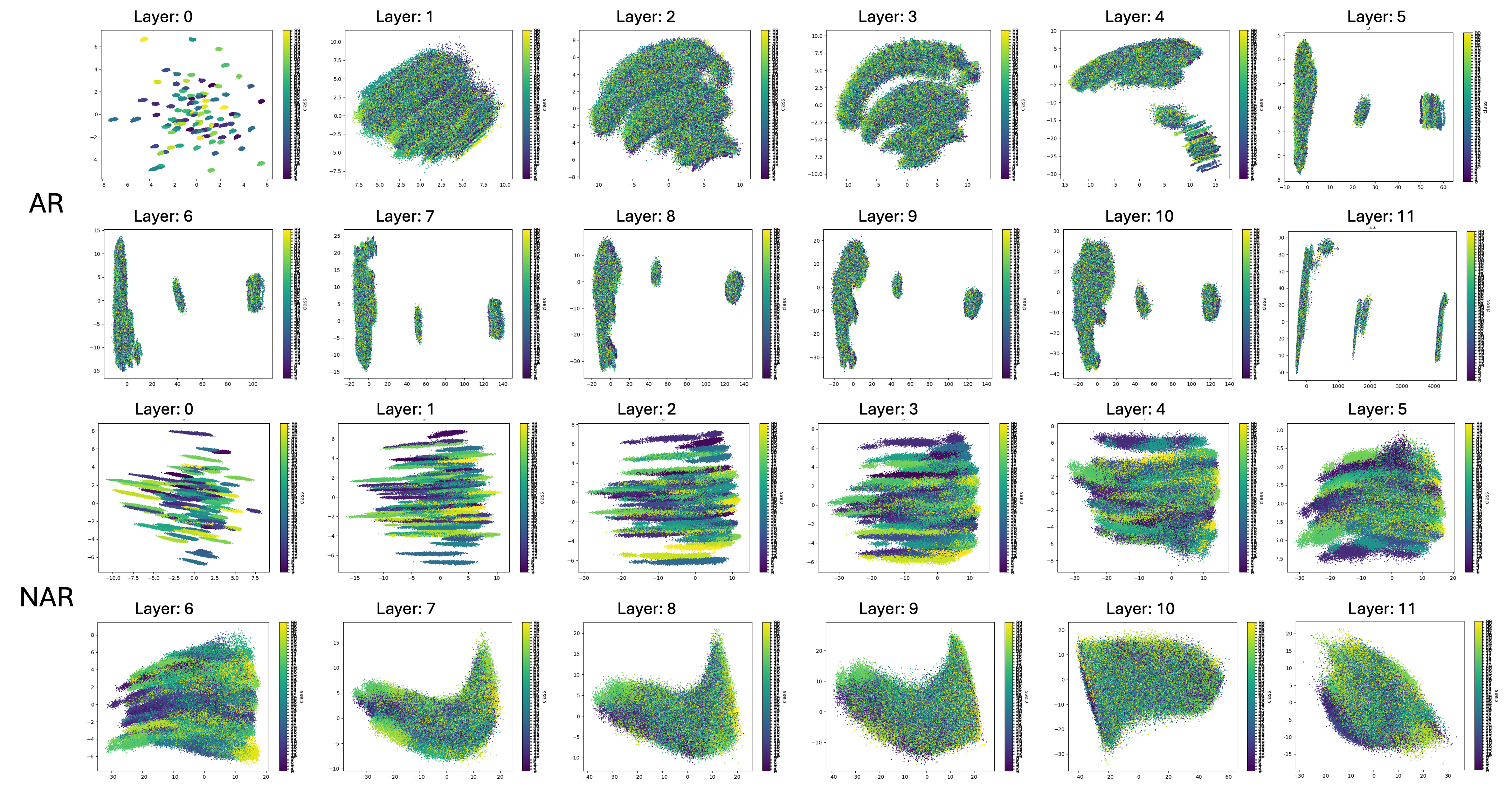
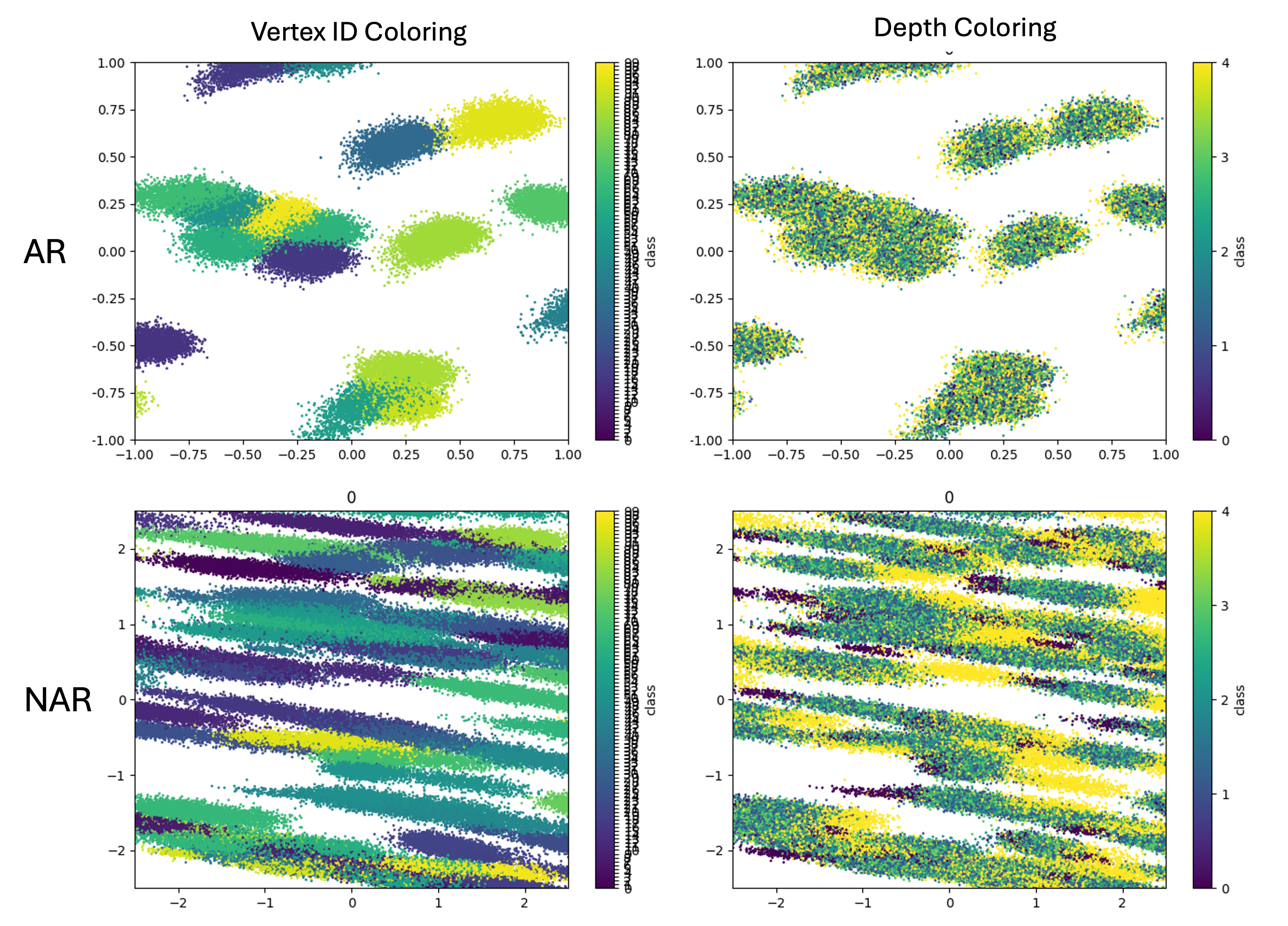
Анализ латентного представления модели показал, что она эффективно кодирует будущие состояния, что подтверждается ее способностью предвидеть исходы и планировать соответствующие действия. В процессе обучения модель формирует внутреннее представление, позволяющее ей прогнозировать результаты различных действий в заданном окружении. Это достигается за счет формирования компактного и информативного представления о возможных будущих состояниях, что позволяет модели оценивать перспективность различных стратегий планирования и выбирать наиболее оптимальный путь достижения цели. Эффективность кодирования будущих состояний подтверждается высокой точностью модели при решении задач планирования, требующих предвидения и учета долгосрочных последствий действий.
К Надежному Планированию: Ассоциативная Память и Перспективы Развития
Наблюдаемые возможности дискретных диффузионных моделей по планированию обусловлены их способностью к ассоциативной памяти. Модель не просто обрабатывает текущую ситуацию, но и хранит в памяти ранее встречавшиеся состояния, позволяя эффективно извлекать и использовать этот опыт для прогнозирования и выбора оптимальных действий. Этот механизм напоминает человеческую способность вспоминать прошлые события и применять их для решения текущих задач, что значительно повышает эффективность планирования, особенно в сложных и неопределенных условиях. Фактически, модель способна «вспоминать» успешные последовательности действий, что позволяет ей быстрее адаптироваться к новым ситуациям и избегать повторения ошибок, демонстрируя, таким образом, ключевую особенность интеллектуального поведения.
Обучение с использованием метода потокового соответствия (Flow Matching) значительно повышает эффективность и стабильность процесса диффузии, что, в свою очередь, приводит к улучшению результатов планирования. В отличие от традиционных подходов, Flow Matching позволяет модели более плавно и предсказуемо переходить между состояниями, минимизируя риски отклонения от оптимального пути. Это достигается за счет оптимизации траектории диффузии, что позволяет быстрее сходиться к желаемому решению и избегать застревания в локальных оптимумах. Улучшенная стабильность процесса особенно важна при решении сложных задач планирования, где даже небольшие отклонения могут привести к значительным ошибкам. В результате, модели, обученные с применением Flow Matching, демонстрируют повышенную надежность и точность при планировании, открывая новые возможности для применения в различных областях, требующих интеллектуального принятия решений.
Перспективные исследования направлены на расширение возможностей разработанных методов в контексте более сложных и реалистичных задач планирования. Полученные результаты демонстрируют, что модели NAR (Non-Autoregressive) достигают экспоненциально более быстрой сходимости, что представляет собой значительный прорыв в области искусственного интеллекта. Это открывает возможности для создания систем, способных эффективно планировать действия в динамически меняющихся и неопределенных условиях, приближая нас к созданию по-настоящему интеллектуальных агентов, способных решать широкий спектр задач, от автоматизации производственных процессов до управления сложными робототехническими системами и разработки автономных транспортных средств. Дальнейшее развитие этих технологий позволит существенно повысить эффективность и надежность систем искусственного интеллекта, что, в свою очередь, может привести к новым прорывам в различных областях науки и техники.
Исследование демонстрирует, что дискретные диффузионные модели, в отличие от авторегрессионных, способны эффективно решать задачи планирования с учетом перспектив, используя асимметрию структуры данных. Этот подход позволяет им достигать большей эффективности при меньшем количестве шагов. Грейс Хоппер однажды заметила: «Лучший способ предсказать будущее — это создать его». Эта фраза резонирует с представленной работой, поскольку модели, способные эффективно планировать и предвидеть последствия своих действий, действительно формируют более оптимальное будущее решение задачи. Ключевым является способность этих моделей эффективно использовать латентное пространство для планирования, что позволяет им обходить ограничения, свойственные традиционным авторегрессионным моделям.
Куда же дальше?
Представленная работа демонстрирует, что асимметрия в структуре дискретных диффузионных моделей может стать ключом к более эффективному планированию. Однако, следует признать, что это лишь один из способов замедлить энтропию. Версионирование моделей — форма памяти, позволяющая удерживать ценные решения, но и оно не вечно. Стрела времени всегда указывает на необходимость рефакторинга, на поиск более элегантных и устойчивых решений.
Очевидным направлением для дальнейших исследований представляется расширение области применения этих моделей за пределы графового обхода. Смогут ли они адаптироваться к задачам, где структура не столь явно выражена, где асимметрия скрыта в потоке данных? Или же, напротив, ограниченность этой асимметрии станет фундаментальным препятствием для создания универсального планировщика?
В конечном итоге, все системы стареют — вопрос лишь в том, делают ли они это достойно. Поиск оптимальных стратегий планирования — это не столько решение конкретной задачи, сколько попытка отсрочить неизбежное, продлить жизнь алгоритма в постоянно меняющейся среде. И в этой борьбе время — не метрика, а среда, в которой существуют системы, определяющая их возможности и ограничения.
Оригинал статьи: https://arxiv.org/pdf/2602.19980.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- РИППЛ ПРОГНОЗ. XRP криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- OM ПРОГНОЗ. OM криптовалюта
- SUI ПРОГНОЗ. SUI криптовалюта
2026-02-25 00:02