Автор: Денис Аветисян
Новый подход к бортовой обработке изображений позволяет космическим аппаратам самостоятельно выявлять и компенсировать дефекты сенсора, вызванные рассеянным светом.
Представлено решение на основе глубокого обучения для сегментации и исключения дефектных пикселей, обеспечивающее автономность космических аппаратов и отказоустойчивость.
Несмотря на возрастающую сложность космических миссий, надежность бортовых систем визуального контроля остается критическим фактором. В данной работе, посвященной ‘Onboard-Targeted Segmentation of Straylight in Space Camera Sensors’, предложен метод, основанный на глубоком обучении, для автоматической сегментации дефектов, в частности, паразитной засветки, возникающей из-за воздействия солнечного света на сенсоры космических камер. Предложенный подход позволяет эффективно изолировать дефектные пиксели непосредственно на борту аппарата, обеспечивая устойчивость к сбоям и повышая автономность космических аппаратов. Возможно ли дальнейшее развитие подобных систем для диагностики и коррекции других типов дефектов сенсоров в реальном времени, расширяя возможности автономной работы космических миссий?
Шёпот Хаоса: Распознавание Артефактов на Космических Камерах
Космические камеры, работающие в условиях экстремального вакуума и радиации, подвержены воздействию блуждающего света — рассеянного излучения, которое не достигает матрицы напрямую от объекта съемки. Этот блуждающий свет создает артефакты на изображениях, проявляющиеся в виде нежелательных засветок, ореолов и ложных сигналов. Подобные артефакты значительно ухудшают качество получаемых данных, затрудняя точную идентификацию и анализ астрономических объектов, а также приводя к неверным интерпретациям научных результатов. Особенно критично это для слабых сигналов, которые могут быть полностью замаскированы или искажены, делая невозможным проведение достоверных исследований в области астрономии и планетологии.
Традиционные методы коррекции артефактов, возникающих на снимках, полученных космическими камерами, зачастую оказываются неэффективными при столкновении со сложными или ранее неизвестными паттернами рассеянного света. Это связано с тем, что большинство существующих алгоритмов разработаны для работы с предсказуемыми источниками помех и не способны адаптироваться к новым, неожиданным явлениям. В связи с этим, всё более актуальной становится разработка автоматизированных систем, способных самостоятельно анализировать изображения, выявлять и устранять артефакты, не требуя постоянного вмешательства человека. Такие системы должны опираться на передовые методы машинного обучения и компьютерного зрения, чтобы обеспечить высокую точность и надежность коррекции даже в самых сложных условиях съемки, гарантируя получение достоверных научных данных.
Семантическая Сегментация: Видеть Скрытое
Семантическая сегментация, подраздел глубокого обучения, обеспечивает мощный подход к обнаружению и классификации артефактов на уровне отдельных пикселей изображения. В отличие от традиционных методов, которые идентифицируют артефакты как объекты целиком, семантическая сегментация присваивает каждому пикселю изображения метку класса, определяющую, принадлежит ли он к артефакту или к валидным данным. Это позволяет не только обнаружить наличие артефакта, но и точно определить его границы и форму, что критически важно для последующего анализа и коррекции изображения. Использование сверточных нейронных сетей (CNN) в архитектурах семантической сегментации позволяет автоматически извлекать признаки из изображений и обучать модели для различения артефактов от валидных данных с высокой точностью.
Для точного выделения границ артефактов и их изоляции от полезных данных используются модели семантической сегментации, такие как U-Net, DeepLab и MobileNet. Эти модели обучаются на размеченных данных, где каждый пиксель классифицируется как принадлежащий к артефакту или фону. Обучение позволяет им предсказывать класс каждого пикселя на новых изображениях, создавая маску сегментации, четко очерчивающую границы артефакта. Точность выделения границ критически важна для последующего анализа и удаления артефактов, обеспечивая более качественную обработку изображений.
В условиях ограниченных вычислительных ресурсов бортовых систем, эффективные архитектуры нейронных сетей, такие как MobileNet, играют ключевую роль в реализации семантической сегментации. MobileNet использует глубинные свертки (Depthwise Separable Convolutions), позволяющие значительно уменьшить количество параметров и вычислительную сложность по сравнению со стандартными свертками, сохраняя при этом приемлемую точность. Блоки с инвертированным остаточным соединением (Inverted Residual Blocks) дополнительно оптимизируют структуру сети, расширяя каналы в “узких” слоях и сжимая их в “широких”, что позволяет эффективно извлекать признаки при ограниченных ресурсах памяти и энергии. Такой подход обеспечивает возможность проведения анализа изображений непосредственно на борту аппарата, минимизируя задержки и потребность в передаче больших объемов данных.
Данные и Обучение: Заклинание Надежности
Для обучения надежной модели сегментации необходим специализированный набор данных, состоящий из изображений, полученных с космических камер и содержащих разнообразные артефакты паразитного рассеяния света. Этот набор данных должен включать в себя изображения с различными типами и интенсивностью артефактов, возникающих из-за особенностей оптики, рассеяния света внутри прибора и воздействия космической среды. Объем и разнообразие данных напрямую влияют на способность модели обобщать и точно идентифицировать артефакты в новых, ранее не встречавшихся изображениях. Качество аннотаций, определяющих области расположения артефактов, также критически важно для эффективного обучения модели и достижения высокой точности сегментации.
Методы аугментации данных, такие как случайные повороты, масштабирование, сдвиги и изменения яркости, искусственно увеличивают размер обучающей выборки. Это позволяет модели машинного обучения лучше обобщать полученные знания и повышает её устойчивость к вариациям аномалий, которые не были представлены в исходном наборе данных. Применение различных техник аугментации способствует уменьшению переобучения и улучшению способности модели к обнаружению и сегментации аномалий на новых, ранее не встречавшихся изображениях, что критически важно для обеспечения надежной работы системы в реальных условиях эксплуатации.
Обучение модели сегментации производится с использованием алгоритма оптимизации Adam, который эффективно настраивает веса сети для минимизации функции потерь. В качестве функции потерь применяется Binary Cross-Entropy Loss (Бинарная перекрестная энтропия), оценивающая разницу между предсказанными и фактическими значениями пикселей для каждого класса сегментации. Минимизация этой функции достигается путем итеративной корректировки весов модели на основе градиента, вычисленного по обучающей выборке. Выбор Adam Optimizer обусловлен его способностью адаптировать скорость обучения для каждого параметра, что ускоряет сходимость и повышает точность сегментации. BCE = - \frac{1}{N} \sum_{i=1}^{N} [y_i \log(p_i) + (1 - y_i) \log(1 - p_i)] , где y_i — фактическая метка класса, а p_i — предсказанная вероятность принадлежности к этому классу.
Предварительное обучение модели на датасете Flare7k++, содержащем изображения солнечных вспышек, позволяет значительно ускорить процесс обучения и повысить начальную производительность алгоритма сегментации, особенно при обнаружении артефактов, схожих с вспышками. Использование предварительно обученной модели снижает потребность в большом объеме размеченных данных и способствует более быстрой сходимости алгоритма. В результате, наблюдается улучшение ключевых метрик оценки качества сегментации, таких как точность (Precision), полнота (Recall) и среднее значение Intersection over Union (mIoU), что свидетельствует о более эффективном обнаружении и разделении артефактов на изображениях, полученных с космических камер.
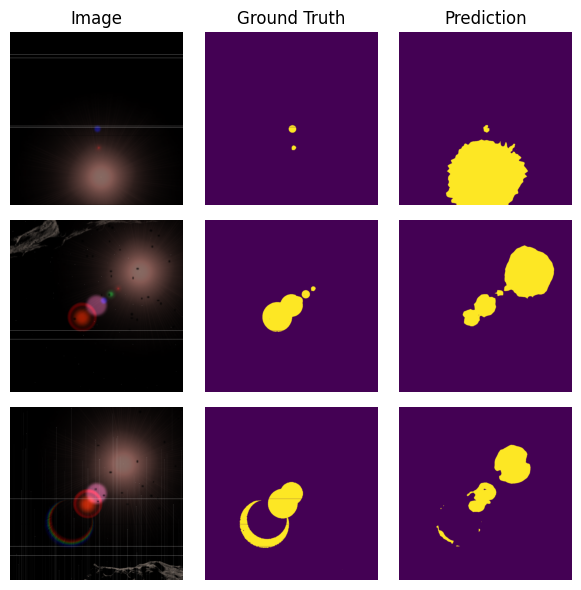
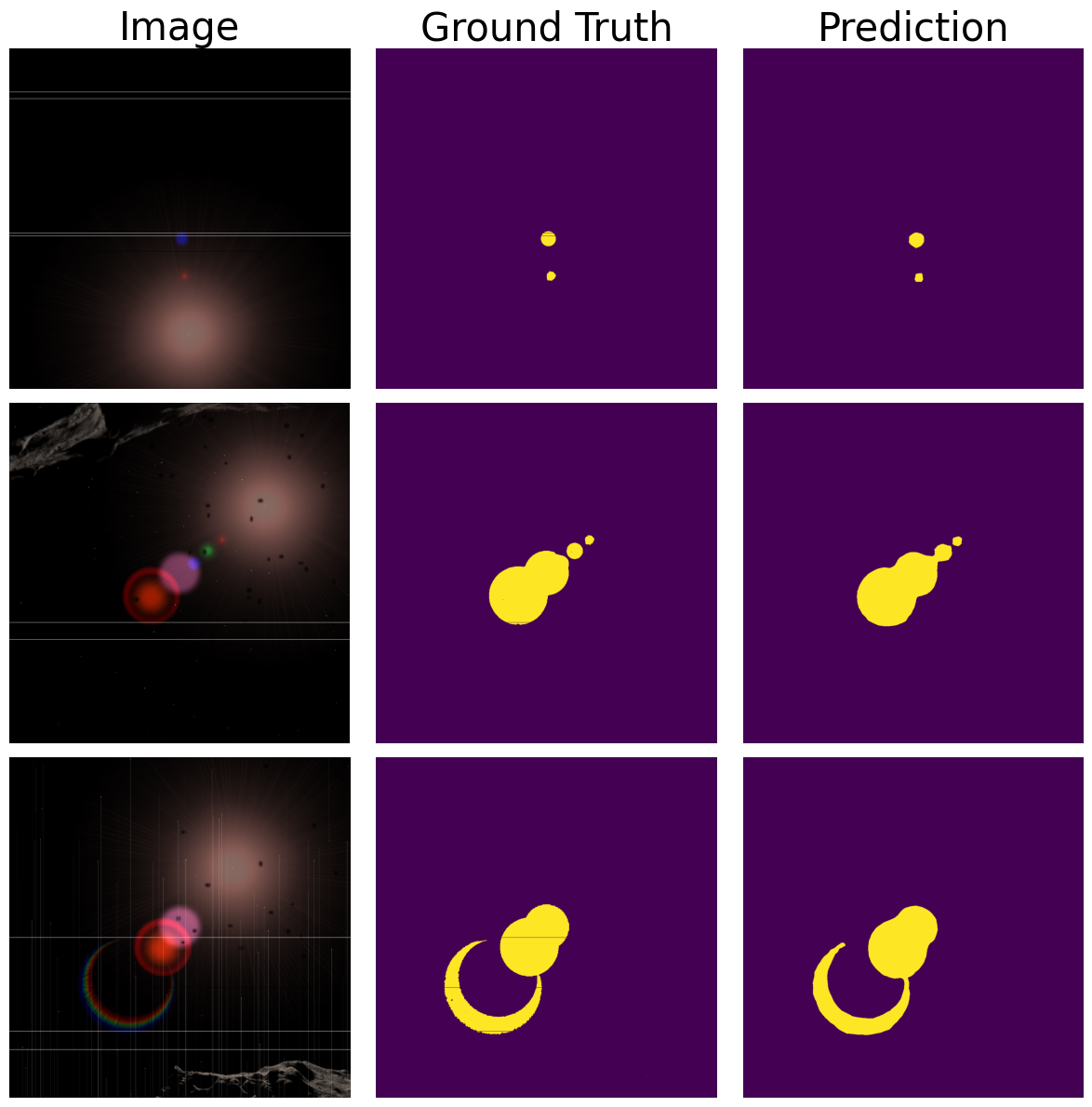
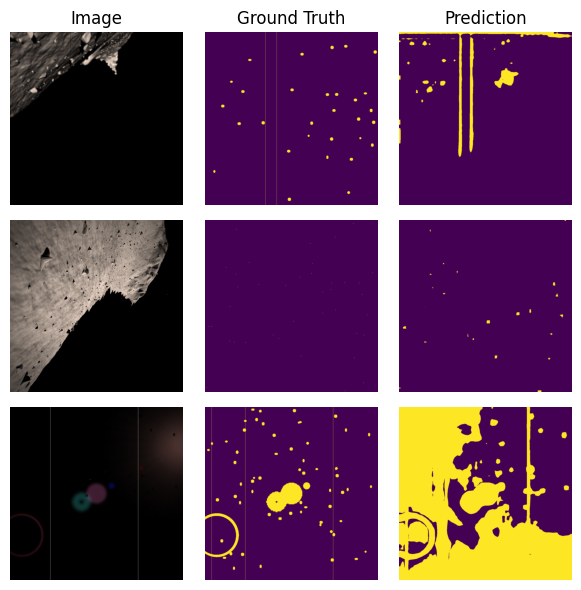
![Набор синтетически сгенерированных изображений и соответствующих сегментационных масок был создан на основе датасета Flare7k++[11].](https://arxiv.org/html/2602.20709v1/mask_000009.png)
Оценка и Подтверждение: Измерение Надежности
Для оценки эффективности разработанной модели сегментации использовался комплекс ключевых показателей. Помимо общепринятых метрик, таких как Mean Intersection over Union (mIoU) и Precision-Recall (PaP), был разработан специализированный показатель — PaR. В отличие от стандартных метрик, фокусирующихся на пиксельной точности, PaR предназначен для оценки способности модели обнаруживать артефакты целиком, что критически важно для задач автоматического контроля качества и диагностики. PaR учитывает не только точность выделения границ артефакта, но и полноту его обнаружения, обеспечивая более надежную оценку способности системы к выявлению дефектов в целом. Использование PaR в сочетании с mIoU и PaP позволяет комплексно оценить производительность модели и ее пригодность для практического применения в условиях ограниченных вычислительных ресурсов и высоких требований к надежности.
Разработанная модель продемонстрировала значительное улучшение ключевых метрик оценки качества сегментации, включая точность (Precision), полноту (Recall) и среднюю степень пересечения (mIoU), благодаря применению методов предварительного обучения и тонкой настройки. Предварительное обучение позволило модели усвоить общие признаки изображений, что существенно ускорило процесс обучения на целевом наборе данных. Дальнейшая тонкая настройка позволила оптимизировать параметры модели для конкретной задачи сегментации дефектов, что привело к повышению точности обнаружения и снижению числа ложных срабатываний. Улучшение этих метрик напрямую влияет на надежность и эффективность автоматизированных систем контроля качества и диагностики, позволяя более точно идентифицировать и классифицировать дефекты.
Высокая точность сегментации играет ключевую роль в эффективном выполнении процедур обнаружения, изоляции и восстановления неисправностей (FDIR). Достижение детального и корректного разделения изображений на различные компоненты позволяет системе оперативно выявлять дефектные элементы, точно локализовать источник проблемы и, что особенно важно, инициировать процедуры восстановления без вмешательства извне. Именно благодаря точности сегментации становится возможным автоматизированный анализ состояния оборудования, прогнозирование потенциальных сбоев и, в конечном итоге, повышение надежности и безопасности функционирования сложных систем. Такая автоматизация существенно сокращает время реакции на нештатные ситуации и минимизирует потенциальные потери, связанные с простоями и повреждениями.
Внедрение вычислительных процессов непосредственно на борту аппарата значительно снижает зависимость от наземных станций связи. Это позволяет не только повысить автономность функционирования, но и обеспечить мгновенный доступ к данным, что критически важно для оперативного принятия решений в сложных ситуациях. Отсутствие необходимости в передаче больших объемов информации на Землю ускоряет анализ и реагирование на нештатные обстоятельства, что особенно ценно при выполнении задач в удаленных районах или в условиях ограниченной пропускной способности каналов связи. Таким образом, переход к бортовой обработке данных является ключевым фактором в развитии полностью автономных систем и повышении их эффективности.

Исследование показывает, что даже в самых строгих условиях космоса, где каждый пиксель на счету, неизбежно возникают аномалии — этот «шепот хаоса» проявляется в виде паразитного света. Авторы предлагают не бороться с ним напрямую, а научить систему обходить поврежденные участки, словно заклинание, позволяющее камере «выживать» даже при частичном отказе. Как однажды заметил Джеффри Хинтон: «Мы формируем представления о мире, а не просто запоминаем данные». Именно это и происходит здесь: система учится понимать, какие пиксели «лгут», и игнорировать их, чтобы сохранить работоспособность всей системы. Шум, в данном случае, не ошибка, а сигнал о необходимости адаптации.
Что дальше?
Представленное решение, как и любое заклинание, способно усмирить хаос блуждающего света лишь до первого столкновения с реальностью. Идеальная сегментация — это, скорее всего, артефакт тренировочного набора, а не отражение истинной природы дефектов сенсора. Слишком хорошая точность всегда вызывает подозрение: возможно, мы просто не искали достаточно глубоко, чтобы найти истинные причины появления паразитных сигналов.
Будущие исследования должны быть направлены не только на повышение точности, но и на устойчивость алгоритмов к непредсказуемым условиям эксплуатации. Особенно важно исследовать возможности адаптации модели непосредственно на борту аппарата, в условиях ограниченных ресурсов и постоянно меняющегося окружения. Ведь всё, что можно посчитать, не стоит доверия — необходимо научиться предсказывать, когда модель перестанет работать.
В конечном счете, задача автоматического восстановления работоспособности камеры — это не столько инженерная, сколько философская проблема. Это попытка заставить упорядоченный мир алгоритмов смириться с хаотичной природой Вселенной. И, возможно, истинное решение лежит не в улучшении моделей, а в принятии неизбежной непредсказуемости.
Оригинал статьи: https://arxiv.org/pdf/2602.20709.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ORDI ПРОГНОЗ. ORDI криптовалюта
- ПРОГНОЗ ЕВРО К ШЕКЕЛЮ
- ZEC ПРОГНОЗ. ZEC криптовалюта
2026-02-25 21:46