Автор: Денис Аветисян
Новый алгоритм TIGRE позволяет автомобильным радарам более точно определять углы и расстояния до объектов, эффективно отсеивая ложные цели, вызванные многолучевым распространением сигнала.
В статье представлен метод Target Induced Angle Grid Regularized Estimation (TIGRE) для идентификации ложных целей в автомобильных радарах на основе MIMO, повышающий точность оценки углов и вычислительную эффективность.
В условиях реальных дорожных ситуаций автомобильные радары подвержены многолучевому распространению сигнала, приводящему к появлению ложных целей — «призраков», затрудняющих надежную навигацию. В работе, посвященной ‘Target Induced Angle Grid Regularized Estimation for Ghost Identification in Automotive Radar’, предложен новый алгоритм TIGRE, использующий регуляризацию, основанную на анализе структуры многолучевого распространения, для повышения точности оценки углов прихода и ухода сигнала. Данный подход позволяет асимптотически обеспечить разреженность на двумерной угловой сетке, значительно улучшая качество оценки в условиях низкого отношения сигнал/шум. Сможет ли TIGRE стать ключевым компонентом в создании более надежных и безопасных систем автономного вождения?
Иллюзия Призрачных Целей: Проблема Современных Автомобильных Радаров
Современные автомобильные радары, играющие ключевую роль в обеспечении безопасности движения, нередко сталкиваются с проблемой ложных обнаружений, известных как “фантомные цели”. Эти ошибочные сигналы возникают из-за отражения радиоволн от различных объектов — зданий, дорожных знаков, других автомобилей — и создают иллюзию наличия помех или даже несуществующих препятствий. Подобные ложные срабатывания могут приводить к нежелательным торможениям, ложным предупреждениям водителя и, в конечном итоге, к снижению доверия к системе помощи водителю. Эффективное решение проблемы “фантомных целей” является критически важным для повышения надежности и безопасности автономных транспортных средств и современных систем активной безопасности.
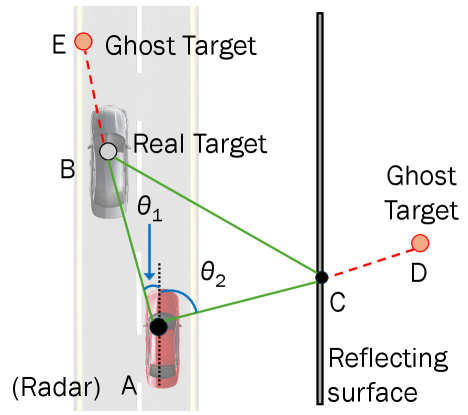
Ложные цели в автомобильных радарах часто возникают из-за явления многолучевого распространения сигнала. Суть заключается в том, что радиоволны, испускаемые радаром, отражаются не только от реальных объектов, но и от различных поверхностей — зданий, дорожного покрытия, других автомобилей. Эти отраженные сигналы достигают приемника радара по нескольким разным путям, создавая иллюзию наличия дополнительных объектов, которых на самом деле нет. Этот эффект, подобно эху, может приводить к ошибочной интерпретации данных и, как следствие, к ложным срабатываниям систем безопасности. Особенно сильно многолучевое распространение проявляется в городских условиях с плотной застройкой, где существует множество отражающих поверхностей, что значительно усложняет задачу точного определения местоположения и скорости реальных объектов.
Традиционные алгоритмы обработки сигналов автомобильных радаров испытывают значительные трудности при различении реальных объектов от ложных отражений, особенно в условиях сложной городской застройки. Множественные отражения от зданий, дорожных знаков и других препятствий создают «призрачные цели», которые могут быть ошибочно приняты за другие транспортные средства или пешеходов. Это происходит из-за того, что стандартные методы полагаются на амплитуду и время прибытия сигнала, которые искажаются при многолучевом распространении. В результате, точность обнаружения снижается, а вероятность ложных срабатываний возрастает, что создает потенциальную опасность для безопасности дорожного движения. Разработка новых методов фильтрации и классификации сигналов, способных эффективно подавлять эти ложные отражения, является ключевой задачей для повышения надежности современных автомобильных радаров.
TIGRE: Элегантное Решение для Оценки в Радиолокации
Метод Target Induced angle-Grid Regularized Estimation (TIGRE) представляет собой эффективный подход к разрешению неоднозначности в радиолокационной обработке сигналов. Неоднозначность возникает из-за периодичности угловых измерений, приводящей к появлению ложных целей (ghost targets). TIGRE решает эту проблему путем систематического поиска истинного направления на цель, используя дискретизированное представление возможных направлений (DOA/DOD grid). В отличие от традиционных методов, TIGRE использует целе-индуцированный регуляризатор, основанный на ℓ_0-разреженности, который эффективно подавляет отражения от ложных целей и повышает точность оценки угловых координат. Данный подход обеспечивает более надежную и точную локализацию целей в сложных радиолокационных сценариях.
В основе метода TIGRE лежит дискретизация пространства возможных направлений прихода сигнала (DOA) и углов места (DOD) посредством создания сетки. Эта сетка представляет собой набор дискретных точек, каждая из которых соответствует определенному направлению. Систематический поиск истинного местоположения цели осуществляется путем последовательного анализа каждой точки сетки и оценки соответствия между наблюдаемым сигналом и моделью сигнала, приходящего из данного направления. Размер шага сетки определяет точность оценки направления, но влияет на вычислительную сложность алгоритма. Использование дискретной сетки позволяет эффективно перебрать все вероятные направления и идентифицировать наиболее подходящее, даже в условиях сильных помех и многолучевого распространения сигнала.
Метод TIGRE использует дискретизацию пространства возможных направлений (сетку DOA/DOD) в сочетании с регуляризатором, основанным на ℓ₀-норме. Этот регуляризатор, ориентированный на целевой сигнал, способствует подавлению ложных отражений (ghost targets) за счет стимулирования разреженности решения. Применение ℓ₀-нормы в качестве регуляризатора позволяет эффективно отсеивать нежелательные компоненты сигнала, возникающие из-за многолучевости и других источников помех, тем самым повышая точность оценки истинного местоположения цели.
Как показано в представленной работе, TIGRE реализует новый алгоритм, демонстрирующий превосходство в точности оценки направления на цель (DOA/DOD) и вычислительной эффективности по сравнению с существующими методами. Алгоритм использует дискретизированное представление возможных направлений и целевой регуляризатор, что позволяет эффективно подавлять ложные отражения и повышать скорость вычислений. Экспериментальные результаты подтверждают, что TIGRE обеспечивает более высокую точность оценки DOA/DOD при сравнимых или меньших вычислительных затратах, что делает его перспективным решением для задач радиолокационной обработки сигналов.

Методологические Детали и Реализация: Строгость и Точность
Алгоритм TIGRE использует аналитическое решение (closed-form solution) для быстрой оценки сетки углов прибытия/угла отклонения (DOA/DOD). В отличие от итеративных методов, данное решение позволяет напрямую вычислить оценку углов, минимизируя время вычислений. Для повышения точности и скорости сходимости, аналитическое решение дополняется процедурой кастомизированной инициализации, которая задает начальные значения для параметров оценки, обеспечивая более стабильную и точную сходимость алгоритма. Данный подход позволяет значительно сократить время, необходимое для определения местоположения источников сигнала, по сравнению с методами, требующими множественных итераций.
Алгоритм TIGRE использует векторы направлений (steering vectors) для моделирования распространения сигнала от различных углов, что позволяет представить каждый принимаемый сигнал как комбинацию сигналов, пришедших с определенных направлений. Для эффективного представления многомерного пространства углов используется тензорное произведение (Кронекера продукт), позволяющее компактно моделировать комбинации углов прибытия (DOA) и углов отклонения (DOD). Векторы направлений, сформированные на основе геометрии антенной решетки и углов, комбинируются с использованием тензорного произведения для создания матрицы, описывающей распространение сигнала. Это позволяет алгоритму эффективно оценивать параметры углов прибытия и отклонения, снижая вычислительную сложность по сравнению с другими методами.
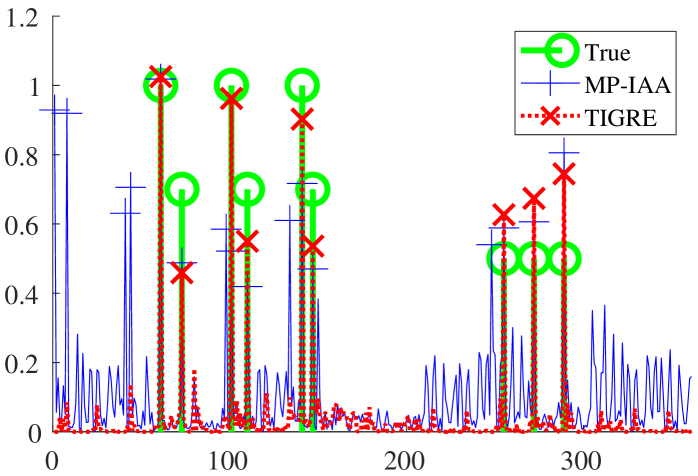
В методологии TIGRE для повышения точности оценки сетки углов прибытия/отбытия (DOA/DOD) применяется метод взвешенных наименьших квадратов (WLS) в рамках итерационного алгоритма MP-IAA. WLS позволяет минимизировать влияние шума и погрешностей измерений за счет назначения различных весов отдельным измерениям, пропорциональных их точности. В процессе реализации, веса определяются на основе оценки ковариационной матрицы шума, что позволяет более эффективно учитывать статистические характеристики сигнала и снижать среднеквадратичную ошибку оценки ||X⋆ - Xtrue||_F^2. Использование WLS в MP-IAA способствует более быстрой сходимости алгоритма и повышению стабильности результатов в условиях различного соотношения сигнал/шум.
Точность оценки углов прибытия (DOA) и углов отклонения (DOD) в системе TIGRE напрямую зависит от отношения сигнал/шум (SNR) принимаемых радиолокационных сигналов. Низкий SNR приводит к увеличению неопределенности в оценках и, как следствие, к повышению погрешности. Для компенсации влияния шума и обеспечения надежной работы системы, применяются методы робастной обработки сигналов, включающие в себя адаптивную фильтрацию, взвешенный метод наименьших квадратов (WLS) и предварительную обработку сигналов для увеличения SNR. Эффективность этих методов критически важна для достижения высокой точности оценки в условиях зашумленных радиолокационных данных, особенно при работе с сигналами с низким SNR.
Результаты количественного анализа, представленные в таблицах II-IV, демонстрируют, что алгоритм TIGRE последовательно обеспечивает минимальную ошибку оценки ||X⋆ - Xtrue||_F^2 по сравнению с алгоритмами IRA и MP-IAA в различных сценариях моделирования. Данный показатель, представляющий собой норму Фробениуса разности между оцененной матрицей состояний X⋆ и истинной матрицей состояний Xtrue, служит ключевым критерием оценки точности алгоритмов. В рамках проведенных экспериментов, TIGRE демонстрирует более стабильные и точные результаты при различных уровнях шума и конфигурациях целевых объектов, что подтверждается данными, представленными в указанных таблицах.
Влияние и Перспективы: Элегантность в Практике и Заглядывая Вперед
Разработанная технология TIGRE значительно повышает надежность обнаружения объектов в автомобильных радарах за счет точного подавления ложных целей — так называемых “призраков”. Это достигается путем эффективной фильтрации нежелательных отражений, что позволяет системе более точно идентифицировать реальные объекты на дороге, такие как другие транспортные средства, пешеходы и препятствия. Повышенная точность обнаружения напрямую способствует улучшению работы систем помощи водителю (ADAS) и, в конечном итоге, открывает новые возможности для развития полностью автономных транспортных средств, делая их более безопасными и эффективными в различных дорожных условиях. Устранение ложных целей позволяет снизить количество ложных срабатываний и повысить уверенность системы в принятии решений, что является критически важным для обеспечения безопасности на дорогах.
Разработанная методология TIGRE, изначально предназначенная для повышения надежности систем автомобильного радара, демонстрирует значительный потенциал применения в более широком спектре технологий, использующих радиолокацию. Принципы подавления ложных целей, реализованные в TIGRE, могут быть адаптированы для улучшения качества изображений и повышения точности обнаружения объектов в различных областях, включая системы наблюдения и безопасности, геологоразведку, и даже в беспилотных летательных аппаратах, использующих радиолокационные датчики для навигации и картографирования местности. Возможность эффективно фильтровать нежелательные сигналы и выделять истинные объекты делает TIGRE ценным инструментом для любой системы, где требуется точное и надежное радиолокационное восприятие окружающей среды, открывая перспективы для существенного повышения эффективности и безопасности различных технологических решений.
Дальнейшие исследования направлены на адаптацию алгоритма TIGRE к системам радаров с множественным входом и выходом (MIMO), что позволит значительно повысить точность и разрешение получаемого изображения. Особое внимание будет уделено улучшению производительности алгоритма в сложных и динамически меняющихся условиях окружающей среды, таких как плохая погода или интенсивное дорожное движение. Разрабатываемые усовершенствования позволят TIGRE эффективно подавлять ложные цели и обеспечивать более надежное обнаружение объектов, что критически важно для систем помощи водителю и беспилотных транспортных средств, функционирующих в реальном времени.
Дальнейшее изучение возможности использования информации о доплеровском сдвиге представляется перспективным направлением для повышения точности различения объектов и снижения влияния ложных целей в радиолокационных системах. Анализ доплеровского сдвига позволяет определить скорость и направление движения объектов, что предоставляет дополнительную информацию для отделения реальных целей от помех и «призраков». Использование данной информации в алгоритмах обработки сигналов позволит более эффективно фильтровать ложные отражения, возникающие из-за многолучевости и других факторов, тем самым повышая надежность и точность систем автоматического управления транспортными средствами и других приложений радиолокации. Повышение устойчивости к помехам и более точное определение характеристик движущихся объектов является ключевым фактором для развития передовых систем помощи водителю и автономного управления.
Исследования показали, что алгоритм TIGRE демонстрирует высокую эффективность с точки зрения вычислительной скорости. В отличие от существующих методов подавления ложных целей в радиолокационных системах, TIGRE требует значительно меньшего количества итераций для достижения сходимости — что подтверждается данными, представленными в таблицах II-IV. Это означает, что обработка радиолокационного сигнала осуществляется быстрее, что особенно важно для систем помощи водителю и автономного управления, где требуется обработка информации в реальном времени. Сопоставимое, а в некоторых случаях и улучшенное время вычислений, в сочетании с низким количеством итераций, делает TIGRE перспективным решением для повышения надежности и эффективности радиолокационных систем.
Исследование, представленное в данной работе, демонстрирует элегантность подхода к сложной проблеме идентификации ложных целей в автомобильных радарах. Алгоритм TIGRE, с его использованием целевого индуктивного регуляризованного оценивания, проявляет глубокое понимание гармонии между точностью и вычислительной эффективностью. Как заметил Мишель Фуко: «Знание — это не представление истины, а скорее способ организации сил». В данном контексте, алгоритм TIGRE организует силы данных радара, чтобы эффективно выявлять и подавлять нежелательные сигналы, представляющие собой ложные цели. Это, безусловно, пример того, как продуманный подход к обработке данных может значительно улучшить функциональность и надежность автомобильных систем.
Куда Далее?
Представленный подход, хотя и демонстрирует улучшение в идентификации ложных целей в автомобильных радарах, лишь слегка отодвигает завесу над сложностью многолучевого распространения. Иллюзия, порожденная отражениями, всегда будет преследовать точность оценки углов, и элегантность решения заключается не в полном подавлении шума, а в его гармоничном включении в модель. Простое увеличение плотности угловой сетки — грубый инструмент; поиск истинной красоты — в изящном алгоритме, который адаптируется к конкретным характеристикам окружающей среды.
Будущие исследования, вероятно, будут направлены на интеграцию методов машинного обучения для динамической адаптации регуляризации, позволяющей алгоритму «обучаться» на паттернах отражений в конкретной среде. Однако, необходимо помнить, что «интеллект» алгоритма не должен заменять фундаментальное понимание физики распространения волн. Рефакторинг существующих методов — это редактирование, а не перестройка; важно не изобретать велосипед, а усовершенствовать его конструкцию.
В конечном счете, задача идентификации ложных целей — это не только техническая, но и философская проблема. Как и в любой системе, ошибка неизбежна, и совершенство недостижимо. Поиск истины требует постоянного анализа, критической оценки и признания ограниченности наших знаний. Истинная элегантность заключается не в отсутствии ошибок, а в изящном способе их исправления.
Оригинал статьи: https://arxiv.org/pdf/2602.11441.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ПРОГНОЗ ДОЛЛАРА
- ZEC ПРОГНОЗ. ZEC криптовалюта
2026-02-15 19:17