Автор: Денис Аветисян
Новый подход позволяет точнее предсказывать траектории других транспортных средств и пешеходов, даже когда они временно скрыты из виду.

Исследование представляет MatchInformer — фреймворк на основе трансформеров, использующий венгерский алгоритм для повышения точности прогнозирования траекторий и оценки вероятности занятости пространства.
Несмотря на значительный прогресс в области автономного вождения, предсказание поведения скрытых участников дорожного движения остается сложной задачей. В статье ‘Don’t double it: Efficient Agent Prediction in Occlusions’ представлен новый подход к решению этой проблемы, основанный на архитектуре MatchInformer, использующей механизм венгерского алгоритма сопоставления для повышения точности предсказания местоположения и траектории скрытых объектов. Предложенный метод позволяет снизить избыточность прогнозов и улучшить интерпретируемость предсказанных путей, что критически важно для безопасного и эффективного планирования движения. Сможет ли данный подход стать основой для создания более надежных систем автономного вождения в условиях сложной городской среды?
Точность предсказаний: вызов автономных систем
Точное предсказание траекторий движения и определения местоположения других участников дорожного движения — критически важная задача для функционирования автономных систем, однако она сопряжена со значительными трудностями. Основным препятствием выступает проблема частичной видимости — когда объекты оказываются скрыты за другими, — а также сложность взаимодействия между множеством движущихся агентов. Например, предсказать поведение пешехода, внезапно решившего перейти дорогу, или маневр автомобиля, объезжающего препятствие, требует учета не только их текущей скорости и направления, но и вероятных намерений, которые сложно определить в условиях ограниченной информации и динамично меняющейся обстановки. Эта непредсказуемость создает серьезные вызовы для обеспечения безопасности и надежности автономных транспортных средств и роботов, требуя разработки передовых алгоритмов и моделей, способных эффективно справляться с неопределенностью и сложными взаимодействиями.
Традиционные методы прогнозирования поведения агентов, такие как фильтры Калмана или простые модели движения, часто оказываются недостаточно эффективными в динамичных средах, насыщенных препятствиями и другими участниками. Основная проблема заключается в неспособности адекватно учитывать неопределенность, связанную с неполной информацией об окружающей обстановке и потенциальных траекториях других агентов. Неточное прогнозирование, даже на короткий промежуток времени, может привести к серьезным последствиям для безопасности автономных систем, особенно в ситуациях, требующих быстрого реагирования, например, при избежании столкновений. Ограниченность этих подходов в обработке вероятностных данных и экстраполяции сложных паттернов движения подчёркивает необходимость разработки более совершенных моделей, способных учитывать множество возможных сценариев и принимать обоснованные решения в условиях неполной информации.
Реальные жизненные ситуации характеризуются высокой степенью сложности и непредсказуемости, требуя от моделей прогнозирования способности улавливать тончайшие поведенческие нюансы и предвидеть будущие действия с максимальной точностью. Простое отслеживание траекторий движения недостаточно; необходимо учитывать контекст, социальные взаимодействия и потенциальные намерения агентов. Разработка таких моделей требует не только передовых алгоритмов машинного обучения, но и обширных наборов данных, отражающих разнообразие реальных сценариев. Именно способность к высокоточному предвидению станет ключевым фактором в создании надежных и безопасных автономных систем, способных эффективно функционировать в динамичной и сложной окружающей среде.

SceneInformer: Трансформер для прогнозирования окружения
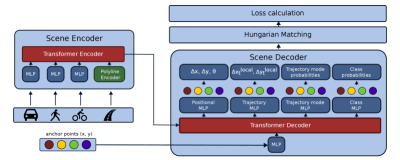
SceneInformer использует архитектуру Transformer для кодирования и декодирования информации об окружающей среде, обеспечивая прогнозирование как заполненности пространства (occupancy), так и траекторий движения объектов. В основе лежит механизм self-attention, позволяющий модели учитывать взаимосвязи между различными элементами сцены и динамически определять их важность при прогнозировании будущих состояний. Архитектура Transformer позволяет SceneInformer эффективно обрабатывать последовательности данных, представляющих историю изменений сцены, и генерировать прогнозы на основе этой информации. Прогнозирование заполненности пространства осуществляется путем определения вероятности нахождения объекта в каждой ячейке сетки, а прогнозирование траекторий — путем предсказания координат объектов в будущих временных шагах.
SceneInformer использует подход «последовательность-к-последовательности» (sequence-to-sequence) для моделирования временных зависимостей в данных о сцене. Это позволяет модели прогнозировать будущие состояния, анализируя исторические данные и выявляя закономерности во временных рядах. Входные данные, представляющие собой последовательность состояний сцены в определенные моменты времени, кодируются, а затем декодируются для генерации прогноза на будущее. Такой подход позволяет SceneInformer учитывать динамику сцены и предсказывать траектории объектов и изменения в структуре окружения на основе предшествующих наблюдений.
Использование точечных свёрток (pointwise convolutions) в архитектуре SceneInformer оказалось вычислительно затратным, что стало причиной поиска стратегий оптимизации. Данный подход, несмотря на свою эффективность в извлечении признаков, требует значительных ресурсов для обработки больших объемов данных, особенно при моделировании сложных сцен и прогнозировании траекторий на длительный период времени. В связи с этим, исследователи сосредоточились на альтернативных методах, направленных на снижение вычислительной сложности без существенной потери точности прогнозирования, включая, например, использование разреженных свёрток или альтернативных архитектур нейронных сетей.
Модель SceneInformer использует подход на основе сетчатой занятости (Grid-based Occupancy) для эффективного представления информации о занятости пространства. Этот подход предполагает дискретизацию окружающего пространства на трёхмерную сетку, где каждая ячейка сетки указывает на наличие или отсутствие препятствия. Такое представление позволяет модели обрабатывать и прогнозировать занятость пространства как последовательность дискретных значений, что упрощает вычисления и повышает эффективность моделирования. Использование сетчатой структуры также обеспечивает стандартизированный и унифицированный формат данных для последующей обработки и анализа.
MatchInformer: Оптимизация предсказаний с помощью сопоставления
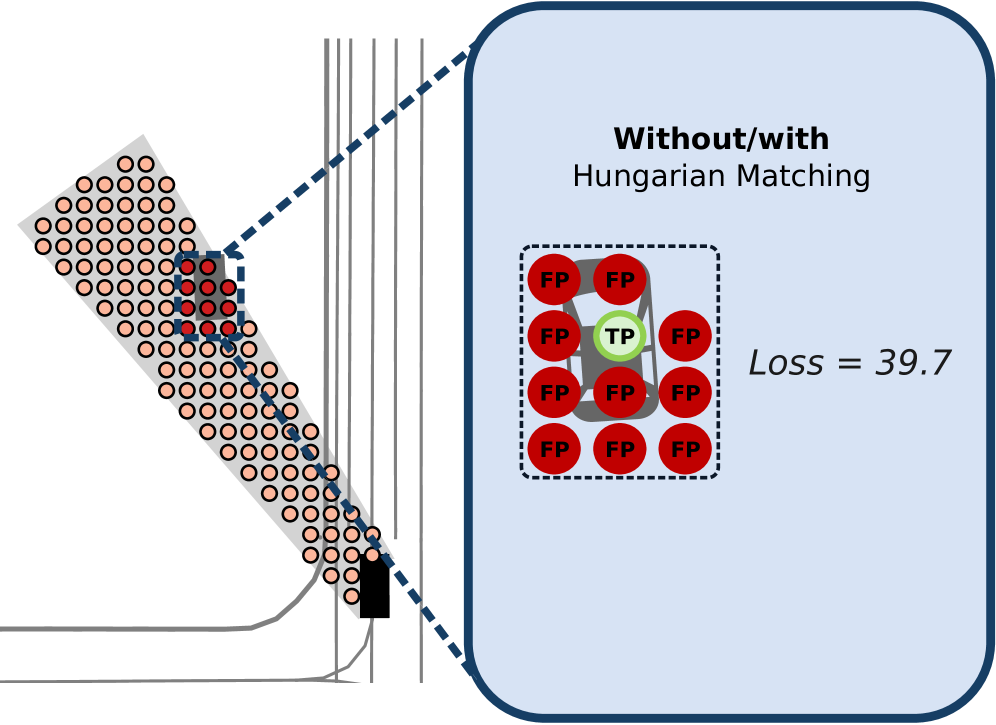
MatchInformer представляет собой расширение архитектуры SceneInformer, в котором реализован алгоритм венгерского алгоритма (Hungarian Matching) для уточнения сопоставления между предсказанными траекториями агентов и их фактическим положением (ground truth). Этот процесс оптимизации позволяет минимизировать функцию потерь за счет обеспечения более точного выравнивания предсказаний и наблюдаемого поведения. Венгерский алгоритм эффективно решает задачу оптимального назначения, находя наилучшее соответствие между предсказанными и реальными агентами, что повышает общую точность предсказания траекторий.
Оптимизация, осуществляемая MatchInformer, направлена на минимизацию функции потерь путем обеспечения точного соответствия между предсказанными траекториями агентов и их фактическим поведением. Это достигается за счет алгоритма венгерского алгоритма (Hungarian matching), который находит оптимальное соответствие между предсказанными и наблюдаемыми позициями агентов. Минимизация функции потерь напрямую влияет на качество предсказаний, поскольку она позволяет модели более эффективно обучаться и избегать ошибок при прогнозировании будущих траекторий. Точное выравнивание предсказаний и наблюдений является ключевым фактором для повышения точности и надежности системы прогнозирования траекторий.
В MatchInformer для повышения скорости вычислений произведена замена точечных свёрток (pointwise convolutions) на полносвязные слои (fully connected layers). Данная оптимизация позволила значительно ускорить процесс предсказания траекторий без снижения точности. В ходе экспериментов было установлено, что замена не приводит к ухудшению метрик оценки качества предсказания, таких как minFDE и minADE, при одновременном сокращении времени вычислений. Это достигается за счет упрощения операций свертки и снижения количества параметров в слоях обработки данных.
В результате применения MatchInformer наблюдается повышение точности предсказания траекторий до 18% по метрике minFDE (Minimum Final Displacement Error) и до 12% по метрике minADE (Minimum Average Displacement Error) в сравнении с моделью SceneInformer. minFDE измеряет минимальное расстояние между конечными точками предсказанной и фактической траектории, в то время как minADE вычисляет среднее расстояние между точками предсказанной и фактической траектории на протяжении всего временного горизонта. Улучшение по обеим метрикам указывает на более точное и надежное предсказание движения агентов в сложных сценах.
Модель MatchInformer разработана для выполнения многоклассовой классификации агентов в сложных сценах. Это означает, что она способна не только обнаруживать агентов, но и определять их тип (например, пешеход, автомобиль, велосипедист) с высокой точностью. Классификация осуществляется на основе анализа наблюдаемого поведения и контекста сцены, что позволяет модели различать агентов даже в условиях высокой плотности и взаимного перекрытия. Функция многоклассовой классификации является ключевым компонентом для прогнозирования траекторий, поскольку позволяет модели учитывать различные модели поведения, характерные для разных типов агентов.
Учет дисбаланса данных и повышение качества предсказаний
В реальных наборах данных часто наблюдается дисбаланс классов, когда некоторые типы агентов встречаются значительно реже других. Это явление представляет собой серьезную проблему, поскольку стандартные алгоритмы машинного обучения склонны оптимизироваться под преобладающие классы, игнорируя редкие, но потенциально важные категории. Например, при анализе трафика пешеходов или транспортных средств, большинство данных может относиться к наиболее распространенным типам участников движения, в то время как редкие случаи, такие как велосипедисты или люди с ограниченными возможностями, могут быть недостаточно представлены. Этот дисбаланс приводит к снижению точности предсказаний для редких классов, что может иметь критические последствия в приложениях, требующих надежного распознавания всех типов агентов, например, в системах автономного вождения или мониторинга безопасности.
Несбалансированность данных, когда одни типы агентов встречаются значительно реже других, может существенно снижать точность предсказаний, особенно в отношении редких классов. Это связано с тем, что стандартные алгоритмы машинного обучения склонны оптимизироваться под преобладающий класс, игнорируя или ошибочно классифицируя объекты из менее распространенных групп. В результате, модель может демонстрировать высокую общую точность, но при этом неспособна надежно идентифицировать важные редкие случаи, что критично для таких задач, как обнаружение аномалий или прогнозирование поведения редких объектов. Уменьшение способности модели к правильной идентификации этих редких классов приводит к ложноотрицательным результатам и, следовательно, к снижению общей надежности системы.
В условиях неравномерного распределения классов в наборах данных, традиционные метрики оценки точности классификации могут вводить в заблуждение. MatchInformer использует коэффициент корреляции Мэтьюса (MCC) как более надежный показатель, способный учитывать дисбаланс между классами. В отличие от метрик, основанных на доле правильно классифицированных примеров, MCC учитывает истинно положительные, истинно отрицательные, ложноположительные и ложноотрицательные результаты, предоставляя более сбалансированную оценку качества классификации, особенно когда редкие классы имеют критическое значение. Этот подход позволяет более точно оценивать эффективность модели в сценариях, где важна не только общая точность, но и способность правильно идентифицировать объекты из малочисленных категорий.
В ходе исследований было установлено, что разработанная система MatchInformer демонстрирует значительное повышение точности классификации, достигающее 74% при использовании коэффициента корреляции Мэттью (MCC) в качестве метрики оценки. Данный результат особенно важен при работе с несбалансированными наборами данных, где отдельные классы представлены значительно меньшим количеством примеров. Повышение точности, измеренное с помощью MCC, свидетельствует об эффективности MatchInformer в выявлении редких классов и минимизации ошибок классификации, что критически важно для обеспечения надёжности и безопасности в различных приложениях, включая прогнозирование занятости и навигацию.
Особое внимание в модели MatchInformer уделяется минимизации ложных срабатываний при предсказании занятости пространства. Это критически важно для обеспечения безопасной навигации, поскольку ошибочное определение свободного пространства как занятого может привести к потенциально опасным ситуациям. Сокращая количество ложных положительных результатов, модель значительно повышает надежность прогнозов, что позволяет автономным системам более уверенно и безопасно ориентироваться в окружающей среде. Повышенная точность прогнозов особенно важна в сложных и динамичных условиях, где даже незначительные ошибки могут иметь серьезные последствия.

Перспективы развития: совершенствование прогнозирования траекторий
Включение прогнозирования скорости рыскания в процесс предсказания траектории позволяет значительно повысить точность предсказания движения. Анализ скорости рыскания, отражающей поворот объекта вокруг вертикальной оси, предоставляет ценную информацию о его намерении и будущей траектории. Исследования показывают, что учёт этой динамической характеристики позволяет системе более эффективно предсказывать изменение направления движения, особенно в сложных ситуациях, таких как маневрирование в плотном потоке или выполнение резких поворотов. Игнорирование скорости рыскания приводит к менее точным прогнозам, увеличивая риск столкновений и снижая эффективность автономных систем. Внедрение алгоритмов, способных точно предсказывать скорость рыскания на основе текущих данных и исторических тенденций, является ключевым шагом к созданию более надежных и безопасных автономных транспортных средств и робототехнических систем.
Понимание ориентации движущегося объекта — ключевой фактор прогнозирования его дальнейших действий и предотвращения столкновений. Исследования показывают, что направление движения, или “заголовок” агента, предоставляет ценную информацию о его намерениях, позволяя системам автономного управления более точно предсказывать траекторию и корректировать собственные действия. Анализ заглавка в сочетании с другими параметрами, такими как скорость и ускорение, значительно повышает надежность прогнозов, особенно в сложных и динамичных средах, где необходимо быстро реагировать на изменения обстановки. Игнорирование ориентации объекта может привести к ошибочным прогнозам и, как следствие, к потенциально опасным ситуациям, поэтому точное определение и учет этого параметра является приоритетной задачей в разработке систем автономного передвижения.
Моделирование траекторий в системе координат относительной траектории позволяет системе адаптироваться к различным сценариям и условиям. Вместо абсолютных координат, определяющих положение агента в глобальном пространстве, используется система, описывающая движение относительно других агентов или объектов. Такой подход значительно повышает обобщающую способность модели, позволяя ей успешно прогнозировать поведение в новых, ранее не встречавшихся ситуациях. Например, система, обученная на данных о движении пешеходов в одном городе, сможет более эффективно работать и в другом городе, благодаря способности абстрагироваться от конкретного местоположения и фокусироваться на относительных изменениях в движении. Использование относительных координат снижает зависимость от конкретной среды и улучшает способность к переносу знаний, что является ключевым фактором для создания надежных и универсальных автономных систем.
Дальнейшие исследования и разработки в области прогнозирования траекторий, включая интеграцию данных о скорости вращения, понимание ориентации агентов и моделирование траекторий в относительной системе координат, открывают перспективы для создания значительно более надежных и устойчивых автономных систем. Улучшение точности прогнозирования позволит транспортным средствам и роботам более эффективно ориентироваться в сложных и динамичных средах, снижая риск столкновений и повышая общую безопасность. Ожидается, что эти усовершенствования окажут существенное влияние на развитие беспилотного транспорта, робототехники и других областей, где требуется автономное принятие решений и взаимодействие с окружающей средой.

Представленная работа демонстрирует элегантный подход к решению сложной задачи предсказания траекторий в условиях ограниченной видимости. MatchInformer, используя механизм венгерского алгоритма сопоставления, эффективно связывает наблюдаемые данные с вероятными траекториями, обеспечивая более точное предсказание поведения других участников дорожного движения. Как однажды заметил Клод Шеннон: «Информация — это не то, что мы получаем, а то, что мы отбрасываем». Данная система, фокусируясь на наиболее релевантных данных и отбрасывая шум, подтверждает эту мысль. Хорошая архитектура незаметна, пока не ломается, и только тогда видна настоящая цена решений. В данном случае, эффективность MatchInformer проявляется в повышении точности предсказаний, что критически важно для безопасности автономного вождения.
Куда Далее?
Представленная работа, безусловно, демонстрирует элегантность подхода к прогнозированию траекторий в условиях частичной видимости. Однако, не стоит забывать об аналогии с организмом: мы улучшили кровоток в одной артерии, но что насчет всего сердца? Вопрос предсказания поведения скрытых агентов не ограничивается лишь точным определением их местоположения. Необходимо учитывать более широкую картину — контекст, намерения, и, что самое сложное, непредсказуемость самих агентов. Улучшение метрики корреляции Мэтью — это важный шаг, но лишь один из многих.
Будущие исследования, вероятно, должны быть направлены на интеграцию моделей, учитывающих социальные взаимодействия и долгосрочное планирование. Простое увеличение точности прогноза траектории не решит проблему безопасности, если система не способна предвидеть сложные маневры или неожиданные изменения в поведении. Необходимо разрабатывать системы, способные не только видеть, но и понимать — пусть и в ограниченной степени — окружающий мир.
В конечном итоге, истинный прогресс заключается не в создании более сложных алгоритмов, а в разработке более простых и понятных систем, которые способны адаптироваться к непредсказуемости реального мира. Это требует отказа от стремления к абсолютной точности и признания того, что в некоторых случаях лучшим решением является признание собственной неопределенности.
Оригинал статьи: https://arxiv.org/pdf/2601.21504.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SAROS ПРОГНОЗ. SAROS криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- ПРОГНОЗ ДОЛЛАРА
- РИППЛ ПРОГНОЗ. XRP криптовалюта
2026-02-01 15:27