Автор: Денис Аветисян
Новый датасет DeepUrban позволяет значительно повысить точность прогнозирования поведения других участников дорожного движения в сложных городских условиях.
Исследователи представили масштабный датасет DeepUrban для оценки и улучшения алгоритмов предсказания траекторий и планирования маршрутов автономных транспортных средств в плотной городской среде.
Несмотря на значительный прогресс в области автономного вождения, создание надежных систем предсказания траекторий и планирования маршрутов в условиях плотного городского трафика остается сложной задачей. В данной работе представляется DeepUrban: Interaction-Aware Trajectory Prediction and Planning for Automated Driving by Aerial Imagery — новый набор данных, полученный с помощью аэрофотосъемки, предназначенный для улучшения бенчмарков в области предсказания и планирования траекторий в сложных городских условиях. Эксперименты показали, что добавление DeepUrban к существующим наборам данных, таким как nuScenes, позволяет повысить точность предсказания и планирования траекторий транспортных средств до 44,1%/44,3% по метрикам ADE/FDE. Какие перспективы открывает использование подобных наборов данных для разработки более безопасных и эффективных систем автономного вождения в реальных городских условиях?
Городская Автономность: Между Теориями и Дорогами
Развертывание автономного транспорта в плотно застроенных городских условиях сопряжено с рядом уникальных проблем прогнозирования, обусловленных сложностью взаимодействий между различными участниками дорожного движения. В отличие от относительно предсказуемых сценариев на автомагистралях, городская среда характеризуется высокой плотностью пешеходов, велосипедистов, других автомобилей и непредсказуемыми маневрами, такими как внезапные остановки, перестроения и повороты. Эти сложные взаимодействия требуют от систем прогнозирования не только точного определения текущего местоположения и скорости объектов, но и способности предвидеть их будущие действия на основе анализа контекста, включая дорожную разметку, сигналы светофоров и поведение других участников движения. Точность прогнозирования напрямую влияет на безопасность и эффективность автономных транспортных средств, поскольку от нее зависит способность планировать оптимальный маршрут и избегать столкновений в динамичной и непредсказуемой городской среде.
Существующие методы прогнозирования траекторий движения сталкиваются с серьезными трудностями при долгосрочном планировании и точном определении намерений участников дорожного движения. Это связано с тем, что поведение пешеходов, велосипедистов и других транспортных средств в городской среде часто непредсказуемо и зависит от множества факторов, таких как дорожная обстановка, сигналы светофоров и действия других участников. Современные алгоритмы, как правило, фокусируются на краткосрочном прогнозировании, что недостаточно для автономных транспортных средств, которым необходимо планировать маршрут на значительное расстояние вперед. Неспособность точно определить намерения других агентов приводит к неоптимальным или даже опасным решениям в сложных городских условиях, подчеркивая необходимость разработки более совершенных методов, учитывающих контекст и вероятностные модели поведения.
Надёжное прогнозирование траекторий движения пешеходов, велосипедистов и других транспортных средств имеет первостепенное значение для обеспечения безопасности и эффективности автономных транспортных средств в непредсказуемых городских условиях. Без точного понимания намерений других участников дорожного движения, автоматизированные системы не способны эффективно планировать маршруты, избегать столкновений и оптимизировать транспортный поток. В условиях высокой плотности населения и сложной инфраструктуры, даже незначительная ошибка в прогнозе может привести к серьёзным последствиям. Поэтому, разработка алгоритмов, способных предсказывать поведение других агентов на длительном горизонте, является ключевой задачей для успешного внедрения автономного транспорта в городскую среду и обеспечения плавного и безопасного взаимодействия всех участников дорожного движения.
ScePT: Прогнозирование, Основанное на Сценах
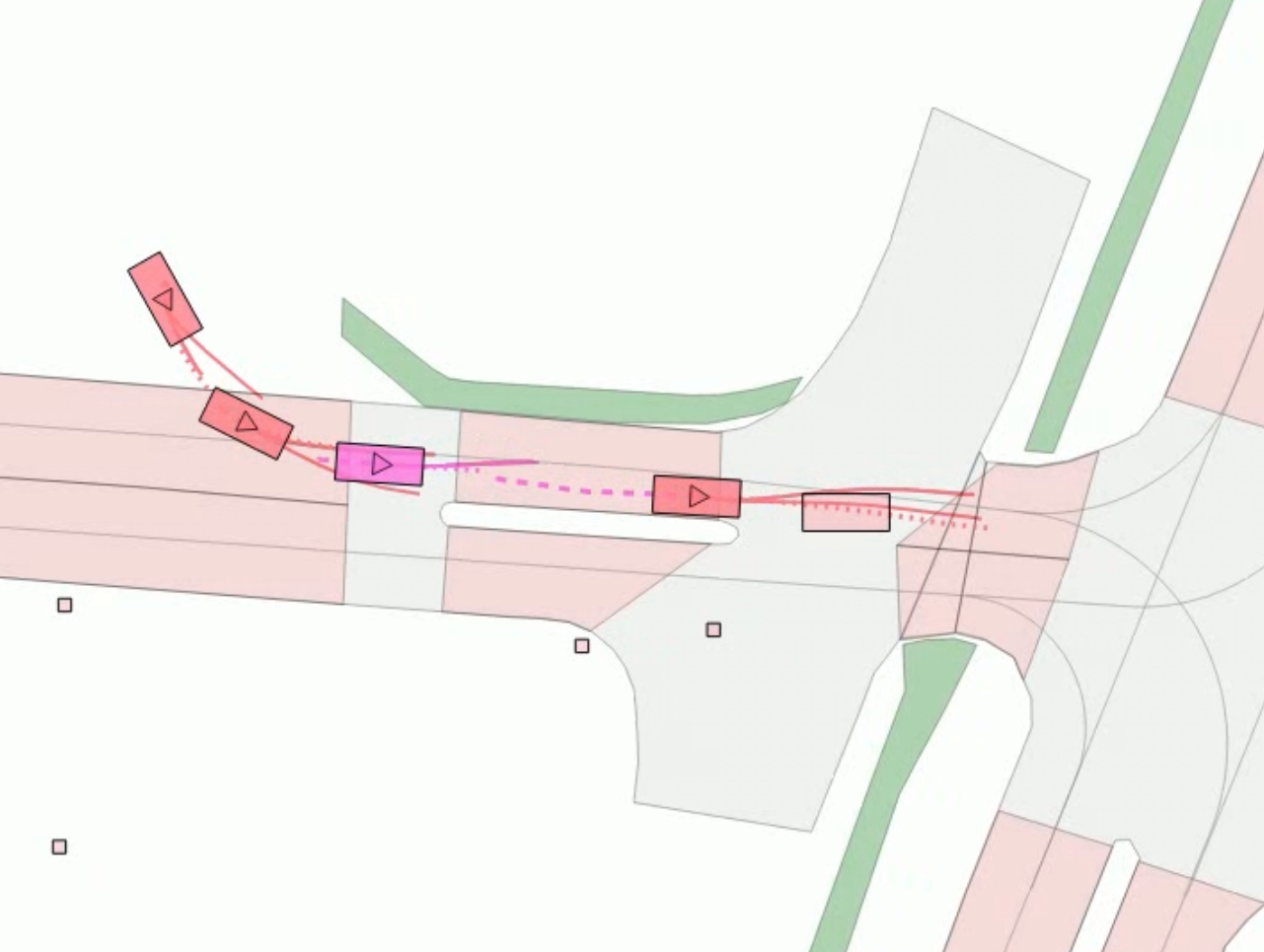
Метод ScePT использует архитектуру трансформатора для прогнозирования сцен, позволяя декомпозировать сложные городские ситуации на взаимодействующие группы агентов. Вместо анализа каждого агента изолированно, ScePT определяет группы, демонстрирующие взаимосвязанное поведение, такие как пешеходы, переходящие дорогу, или транспортные средства, движущиеся в потоке. Этот подход позволяет моделировать зависимости между агентами, учитывая их взаимное влияние на траектории движения. Декомпозиция сцены осуществляется посредством механизма внимания, который динамически определяет значимые взаимодействия между агентами в каждой конкретной ситуации. Такая групповая обработка позволяет более точно предсказывать будущие траектории, особенно в сложных и динамичных городских условиях.
Модель ScePT повышает точность прогнозирования траекторий и долгосрочные прогностические возможности за счет акцента на динамику групп агентов. Вместо анализа каждого участника дорожного движения изолированно, ScePT определяет и моделирует взаимодействия внутри групп — например, пешеходы, переходящие дорогу вместе, или автомобили, движущиеся в плотном потоке. Такой подход позволяет учитывать коллективное поведение и взаимное влияние агентов, что приводит к более реалистичным и точным прогнозам траекторий, особенно на больших временных интервалах. Учет групповой динамики снижает неопределенность и улучшает предсказание будущих маневров, поскольку поведение одного агента становится более предсказуемым в контексте действий группы.
В основе ScePT лежит условный вариационный автоэнкодер (CVAE), используемый для генерации разнообразных и правдоподобных траекторий движения. CVAE позволяет моделировать неопределенность в поведении агентов, генерируя несколько возможных будущих траекторий, учитывая текущее состояние сцены и взаимосвязи между участниками движения. Конкретно, CVAE кодирует наблюдаемые данные в латентное пространство, а затем декодирует их, генерируя распределение вероятностей по возможным будущим траекториям. Использование условного подхода гарантирует, что сгенерированные траектории соответствуют заданному контексту сцены, что повышает реалистичность и точность прогнозирования.
DeepUrban: Испытательный Полигон для Реального Автономства
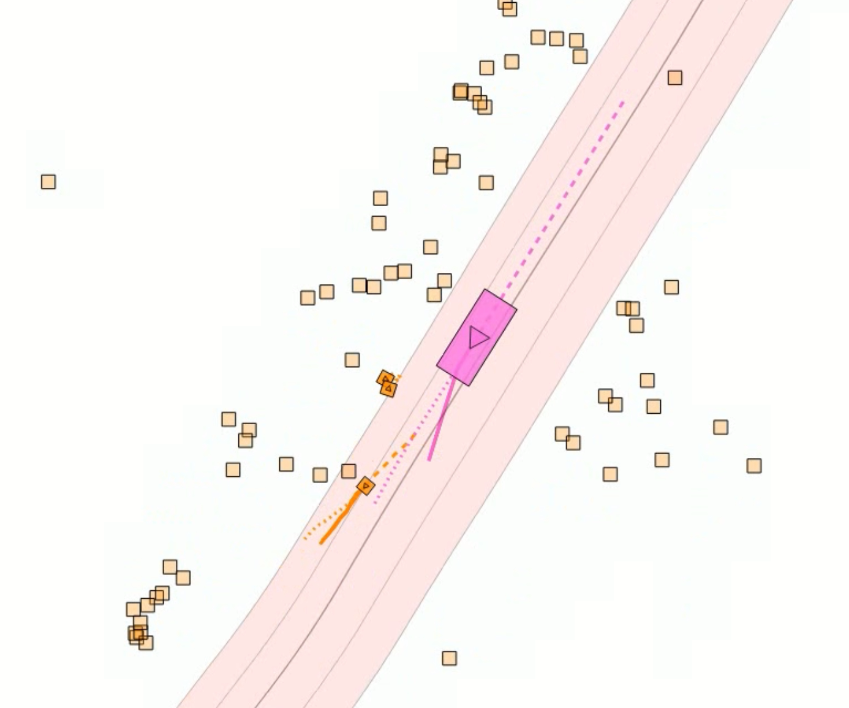
Набор данных DeepUrban представляет собой масштабный и реалистичный ресурс для оценки алгоритмов прогнозирования траекторий и планирования в плотных городских условиях. Он включает в себя данные, собранные с помощью аэрофотосъемки с беспилотников, и точно интегрированные карты OpenDRIVE, обеспечивая комплексное представление об окружающей среде. Этот набор данных предназначен для тестирования и совершенствования систем автономного вождения в сложных сценариях городской среды, позволяя разработчикам оценивать производительность алгоритмов в условиях высокой плотности движения и сложной инфраструктуры. Масштаб и реалистичность DeepUrban позволяют проводить более точную и надежную оценку эффективности алгоритмов по сравнению с существующими наборами данных.
Сбор данных для DeepUrban осуществлялся посредством аэрофотосъемки с беспилотных летательных аппаратов и точной интеграции карт в формате OpenDRIVE. Аэрофотосъемка позволила получить высокодетализированные изображения городской среды, а использование OpenDRIVE обеспечило точное представление дорожной геометрии, разметки, светофоров и других ключевых элементов инфраструктуры. Комбинация этих методов позволила создать комплексную и реалистичную цифровую модель, включающую как визуальную информацию, так и структурированные данные о дорожной сети, необходимые для обучения и оценки алгоритмов автономного вождения.
Реалистичность и масштаб набора данных DeepUrban обеспечивают возможность проведения строгой оценки точности прогнозирования траекторий. При расширении существующего набора данных nuScenes, алгоритмы, обученные на DeepUrban, продемонстрировали улучшение метрики Average Displacement Error (ADE) на 44.1%, Final Displacement Error (FDE) на 44.3%, а также снижение количества столкновений транспортных средств на 49.6%. Данные результаты подтверждают эффективность DeepUrban как эталонного набора данных для разработки и тестирования алгоритмов автономного вождения в сложных городских условиях.
Интеграция Прогнозирования в Планирование: От Теории к Практике
Современные методы планирования движения, такие как PDM (Planning-Driving Model), Hoplan и DiffStack, демонстрируют значительный прогресс в интеграции предсказания траекторий других участников дорожного движения непосредственно в процесс планирования собственного маршрута. Вместо того, чтобы рассматривать окружающую среду как статичную, эти подходы активно используют модели предсказания для оценки вероятных будущих положений других транспортных средств и пешеходов. Это позволяет транспортному средству не только реагировать на текущие препятствия, но и заблаговременно адаптировать свой план движения, избегая потенциальных столкновений и обеспечивая более безопасное и плавное вождение. Различия между этими методами заключаются в способах реализации предсказания и интеграции его результатов в алгоритм планирования, однако общая цель — повышение безопасности и эффективности автономного вождения — остается неизменной.
Современные системы автономной навигации активно используют прогностические модели для повышения безопасности. Вместо реакции на уже возникшие угрозы, данные подходы позволяют предвидеть потенциальные столкновения, анализируя траектории других участников дорожного движения и прогнозируя их дальнейшие действия. На основе этих прогнозов, планировщик траектории оперативно адаптирует запланированный маршрут, избегая опасных ситуаций и обеспечивая безопасное передвижение. Такая проактивная стратегия, в отличие от реактивных систем, значительно снижает риск аварий, особенно в сложных и динамичных условиях, характерных для реальных дорог. В конце концов, всегда проще избежать столкновения, чем пытаться смягчить его последствия.
Виртуальные среды, такие как Carla Simulator, представляют собой незаменимый инструмент для всесторонней оценки эффективности систем, объединяющих прогнозирование траекторий и планирование движения. Эти симуляторы позволяют создавать реалистичные сценарии дорожного движения с разнообразными участниками, включая пешеходов, велосипедистов и другие транспортные средства, что дает возможность тщательно протестировать алгоритмы в контролируемых, но правдоподобных условиях. Благодаря возможности многократного повторения сценариев и автоматизированной оценки различных метрик, включая количество предотвращенных столкновений и общую эффективность маршрутизации, Carla Simulator обеспечивает объективную и надежную проверку работоспособности сложных систем автономного вождения. Использование таких сред значительно ускоряет процесс разработки и отладки, снижая риски, связанные с тестированием непосредственно на реальных дорогах, и обеспечивая повышенную безопасность и надежность разрабатываемых решений.
Исследование, представленное в статье, логично расширяет существующие наборы данных для обучения систем автономного вождения. Создание DeepUrban, наряду с nuScenes, лишь подтверждает старую истину: чем больше реалистичных данных, тем лучше. Однако, за энтузиазмом по поводу генерации сценариев и предсказания траекторий скрывается неизбежная проблема — данные, какими бы качественными они ни были, всегда будут лишь приближением к реальности. Как однажды заметил Ян Лекун: «Машинное обучение — это искусство переводить интуицию в алгоритмы». Иными словами, даже самые сложные модели нуждаются в постоянной адаптации к непредсказуемости городской среды, а элегантные теоретические решения рано или поздно столкнутся с суровой реальностью дорожного движения.
Куда же мы катимся?
Накопление датасетов, подобных DeepUrban, закономерно. Однако, иллюзия, что достаточно данных для «обучения разума», опасна. Проблема не в объеме, а в фундаментальной неспособности существующих моделей к экстраполяции. Городская среда — это хаос, а нейронные сети — лишь сложные интерполяторы. Ожидать от них предвидения совершенно новых сценариев — наивно. Улучшение метрик на бенчмарках — это, конечно, приятно, но реальный мир всегда найдёт способ обмануть даже самую «точную» модель.
Акцент на collision avoidance — это, безусловно, важно, но лишь вершина айсберга. Гораздо интереснее вопрос о предсказании намерений других участников движения, а это уже область, где «глубокое обучение» пока бессильно. Скрипт, удаляющий прод, не предсказывает катастрофу, он её вызывает. То же самое и с автономным вождением: пока мы учим машины реагировать, а не понимать, нас ждёт лишь более изощрённая форма автоматического хаоса.
Появление новых датасетов — это хорошо. Но пока не будет разработана адекватная модель непредсказуемости, всё это останется лишь дорогостоящей демонстрацией возможностей, которые так и не будут реализованы в полной мере. Тесты — это форма надежды, а не уверенности. И рано или поздно, этот понедельник наступит.
Оригинал статьи: https://arxiv.org/pdf/2601.10554.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- БИТКОИН ПРОГНОЗ. BTC криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ШЕКЕЛЮ
- ЭФИРИУМ ПРОГНОЗ. ETH криптовалюта
- SOL ПРОГНОЗ. SOL криптовалюта
- SIREN ПРОГНОЗ. SIREN криптовалюта
- ZEC ПРОГНОЗ. ZEC криптовалюта
- TON ПРОГНОЗ. TON криптовалюта
- MYX ПРОГНОЗ. MYX криптовалюта
- ДОГЕКОИН ПРОГНОЗ. DOGE криптовалюта
- ПРОГНОЗ ДОЛЛАРА К ЗЛОТОМУ
2026-01-17 23:38